Video Understanding⚓︎
约 1842 个字 预计阅读时间 9 分钟
视频 = 2D 图像 * 时间
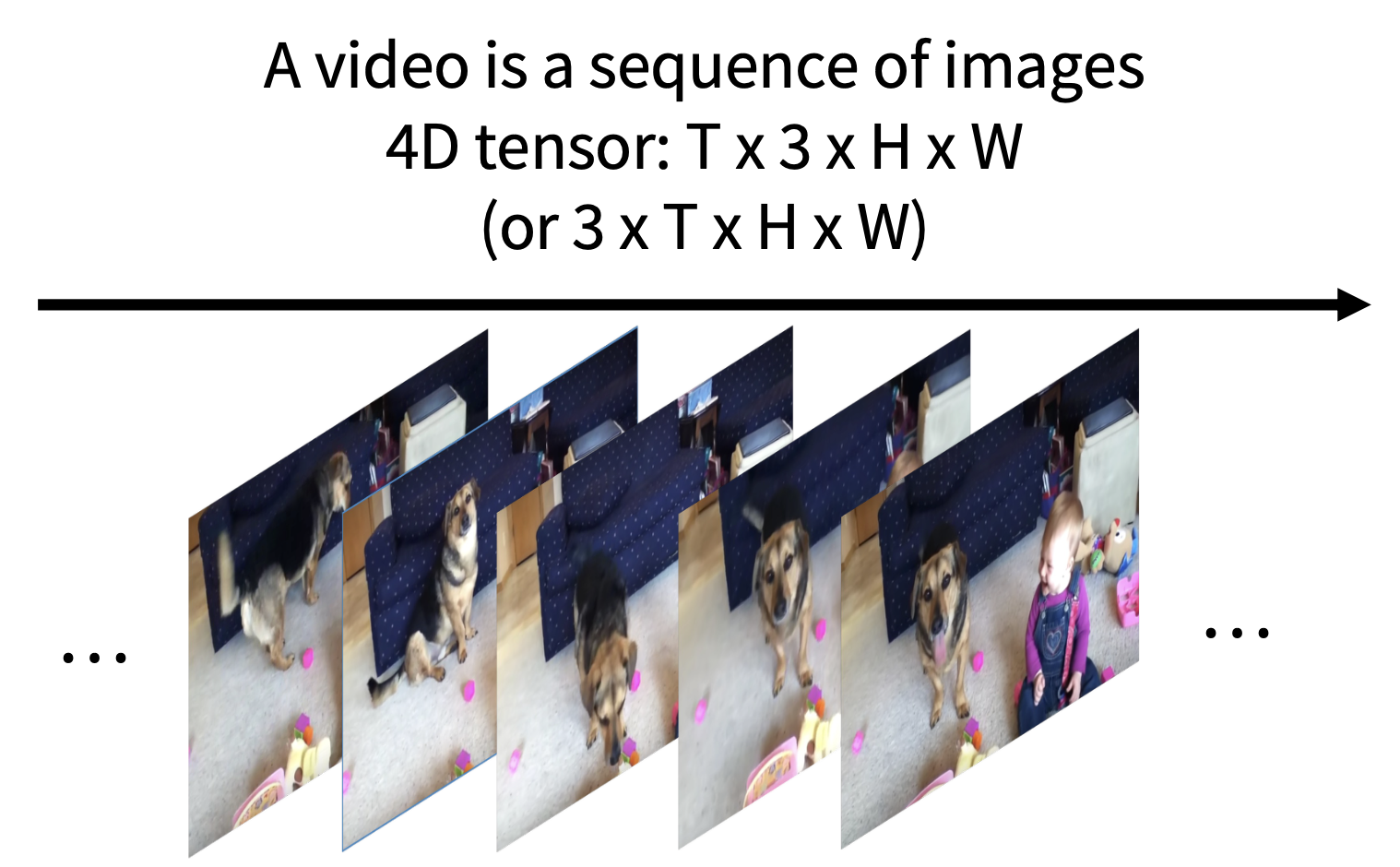
Video Classification⚓︎
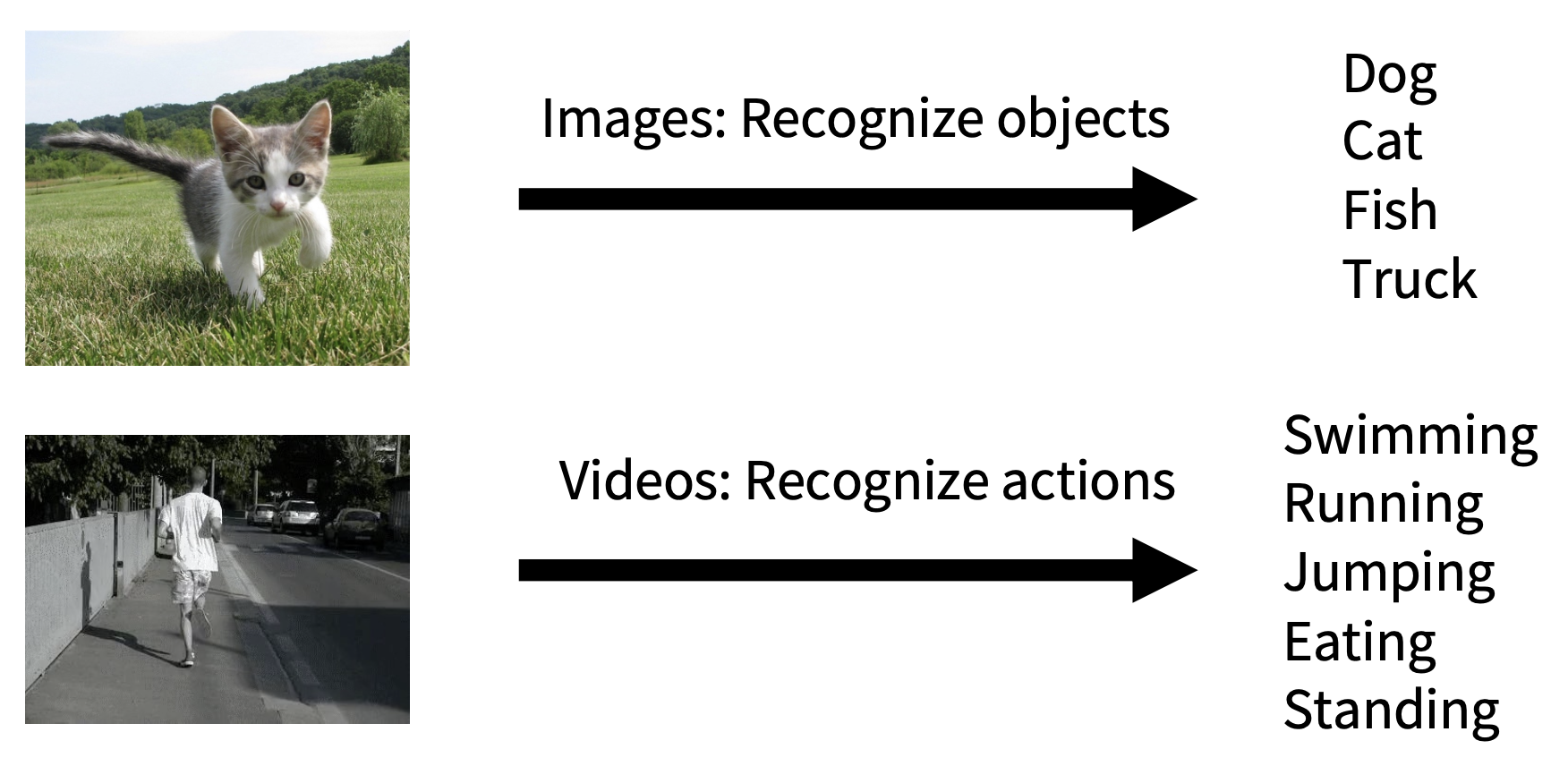
视频分类任务与图像分类类似,但目标是识别视频中的行动(action)。
要完成这项任务,就不得不要解决一个问题:视频数据比图像大得多!
- 一般视频每秒约 30 帧(fps)
-
未压缩的视频大小
- SD(标清,640 x 480
) :每分钟约 1.5 GB - HD(高清,1920 x 1080
) :每分钟约 10 GB
- SD(标清,640 x 480
-
解决方案:在短片段(short clips) 上训练:低帧率、低空间分辨率
- 例如:T=16, H=W=112(5fps 下 3.2s, 588 KB)
-
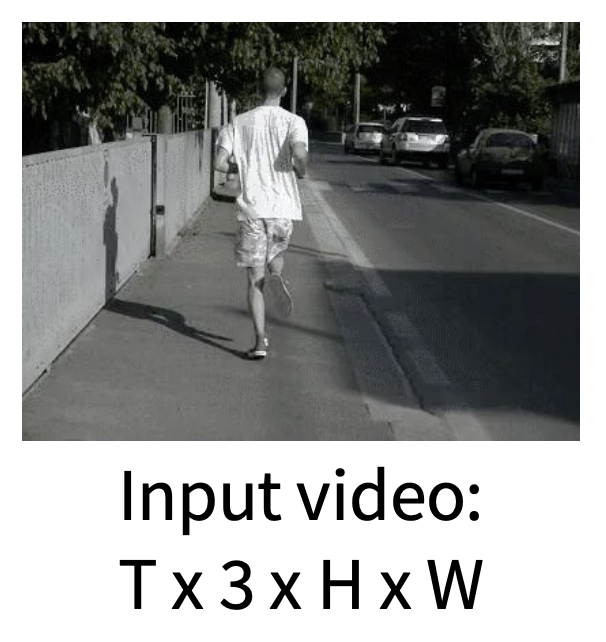
原始视频:时间长,FPS 大

-
训练阶段:训练能够在低帧率的短片段上分类

-
测试阶段:在不同片段上运行模型,计算预测的平均值

具体的视频分类技术包括:
-
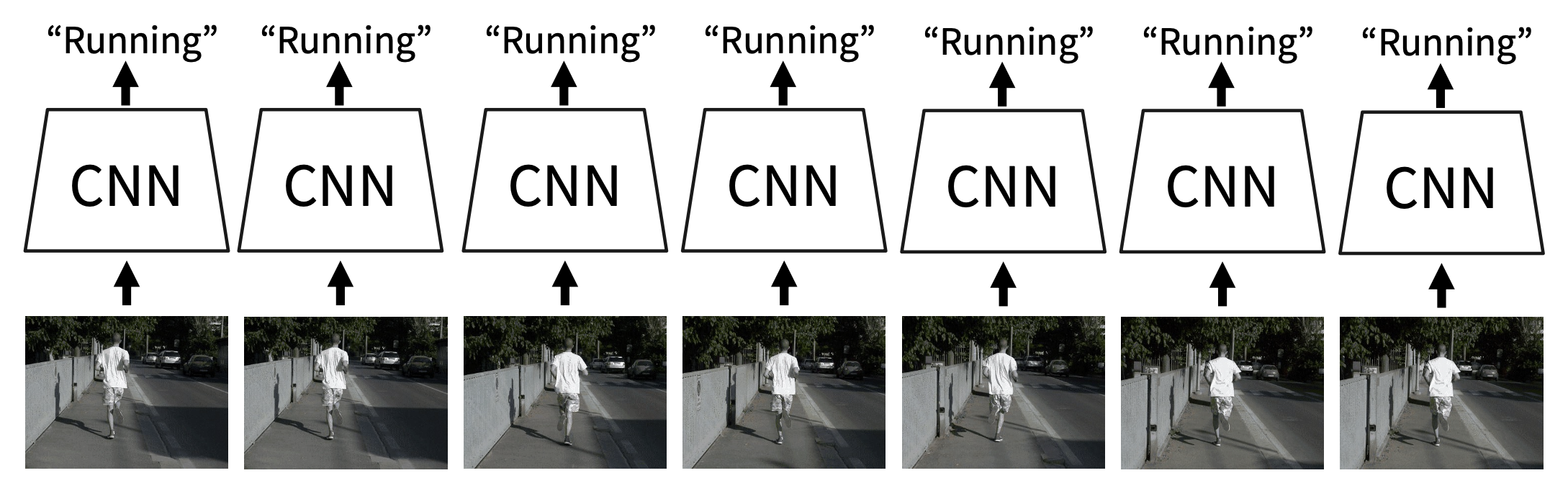
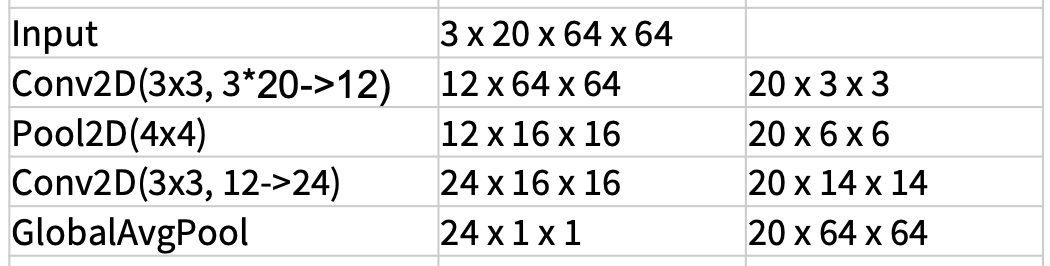
单帧 CNN(single-frame CNN)
- 训练一个普通的 2D CNN,用于独立地对视频帧分类
- 测试时计算预测概率的平均值
- 通常作为一个非常强的视频分类模型的基准
-
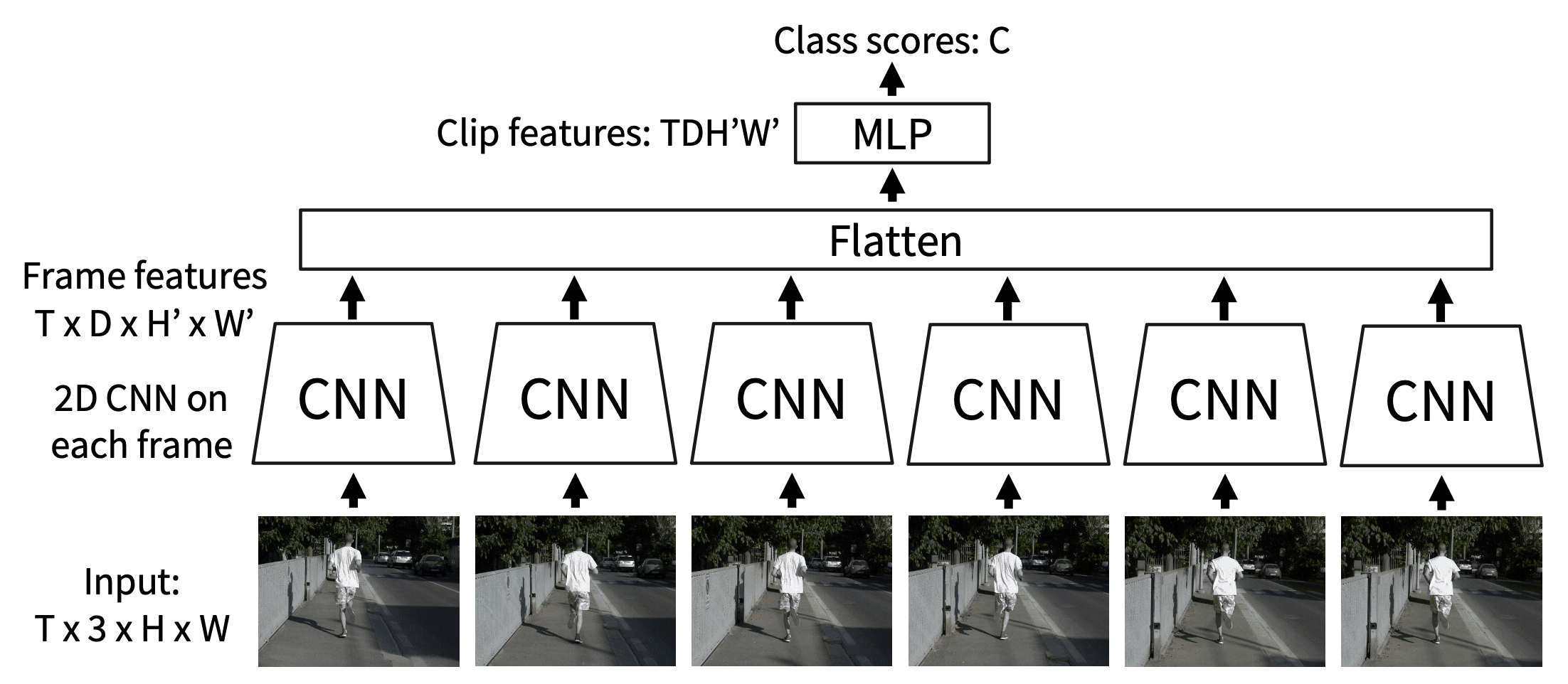
晚期融合(late fusion)
- 直觉:获取每帧的高层次外观,并将它们结合起来
-
使用 FC 层:在每个帧上运行 2D CNN,然后连接特征,并输入到 MLP 中
-
使用池化(pooling):在每个帧上运行 2D CNN,然后池化特征,并输入到线性层中
- 问题:难以比较帧之间的低层级运动
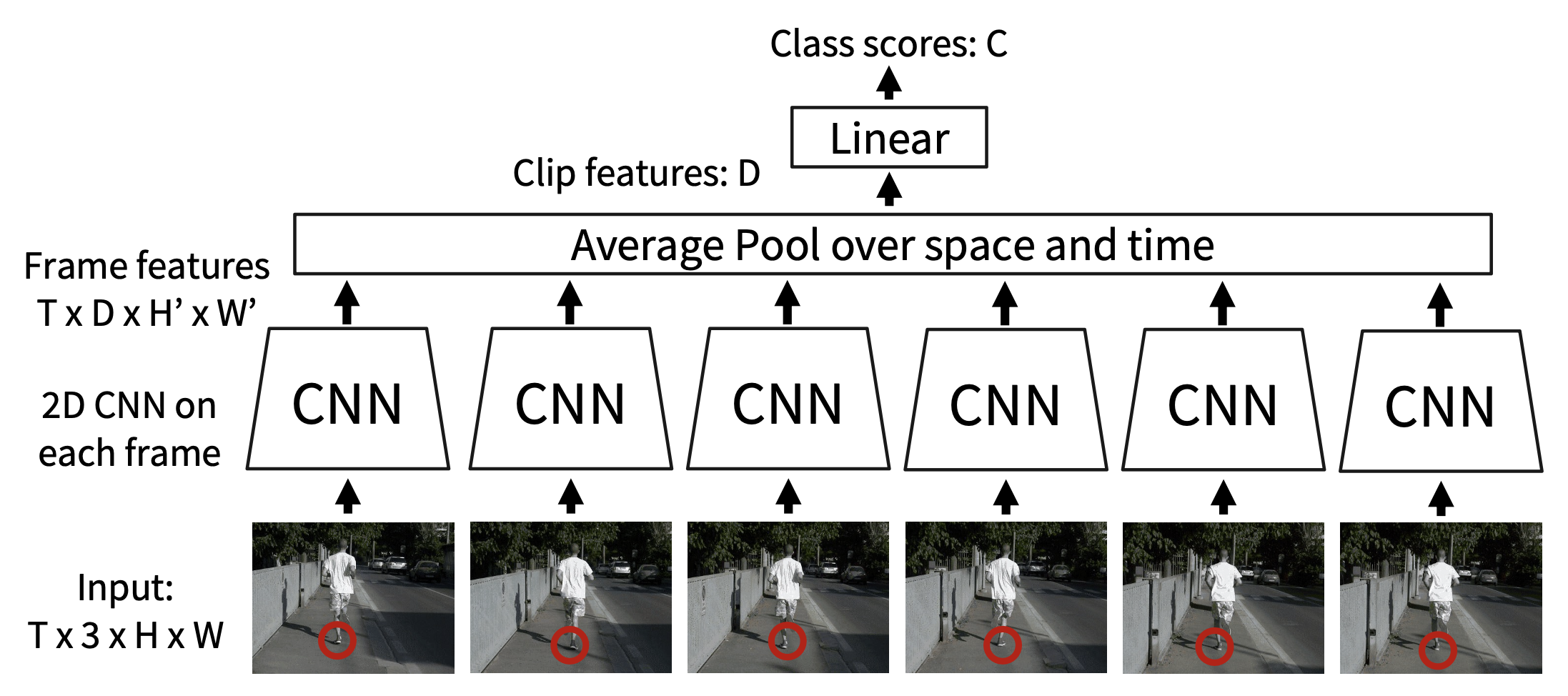
-
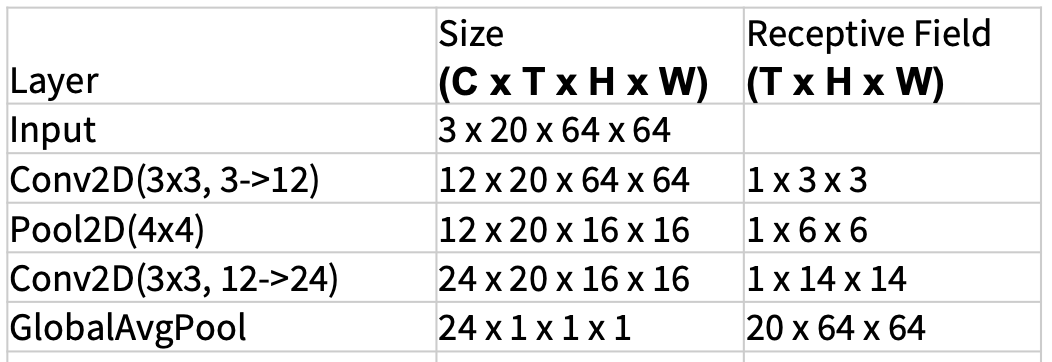
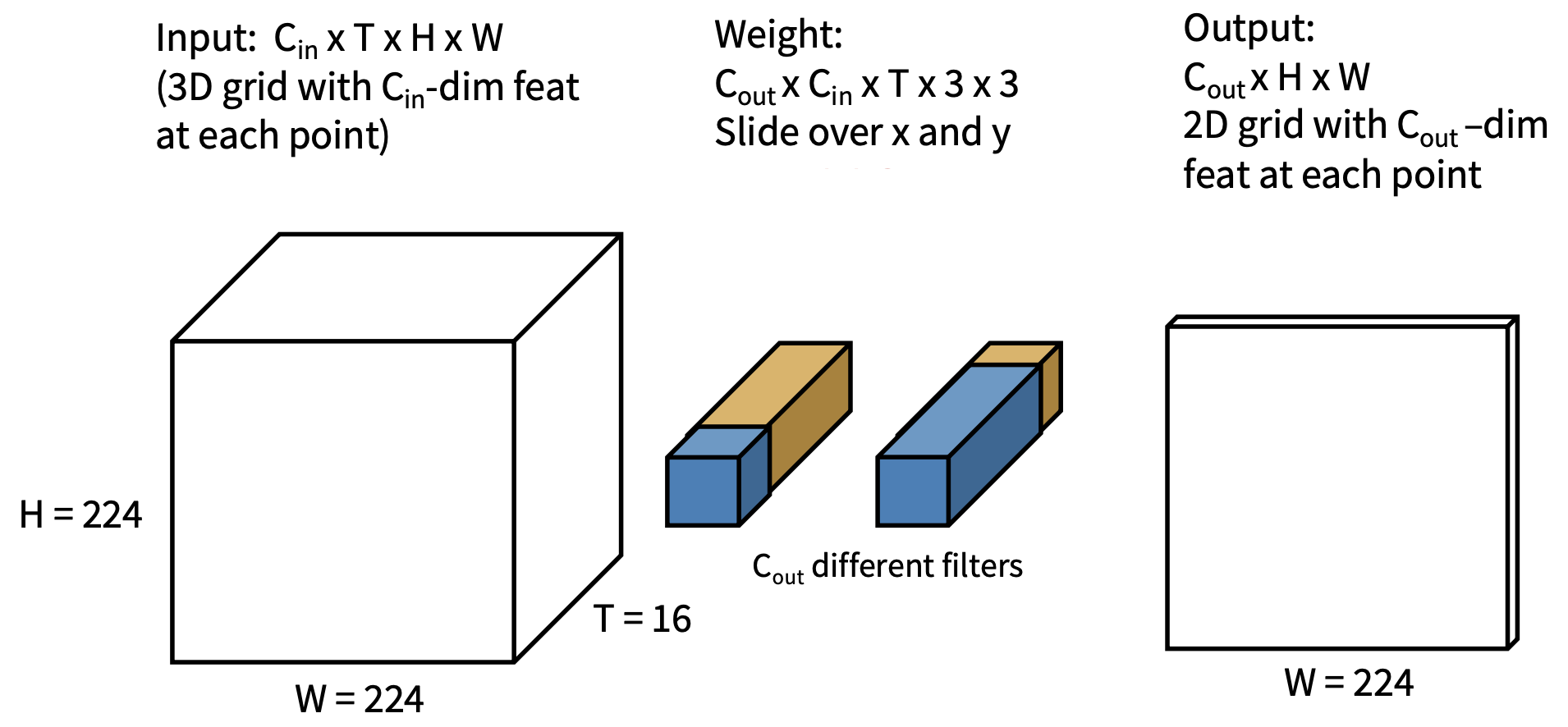
早期融合(early fusion)
- 直觉:与第一个卷积层比较,之后用正常的 2D CNN
-
第一个卷积层压缩所有的时间信息
- 输入:3T x H x W
- 输出:D x H x W
-
剩余的网络是标准的 2D CNN
- 问题:只用一层处理时间信息可能不太够
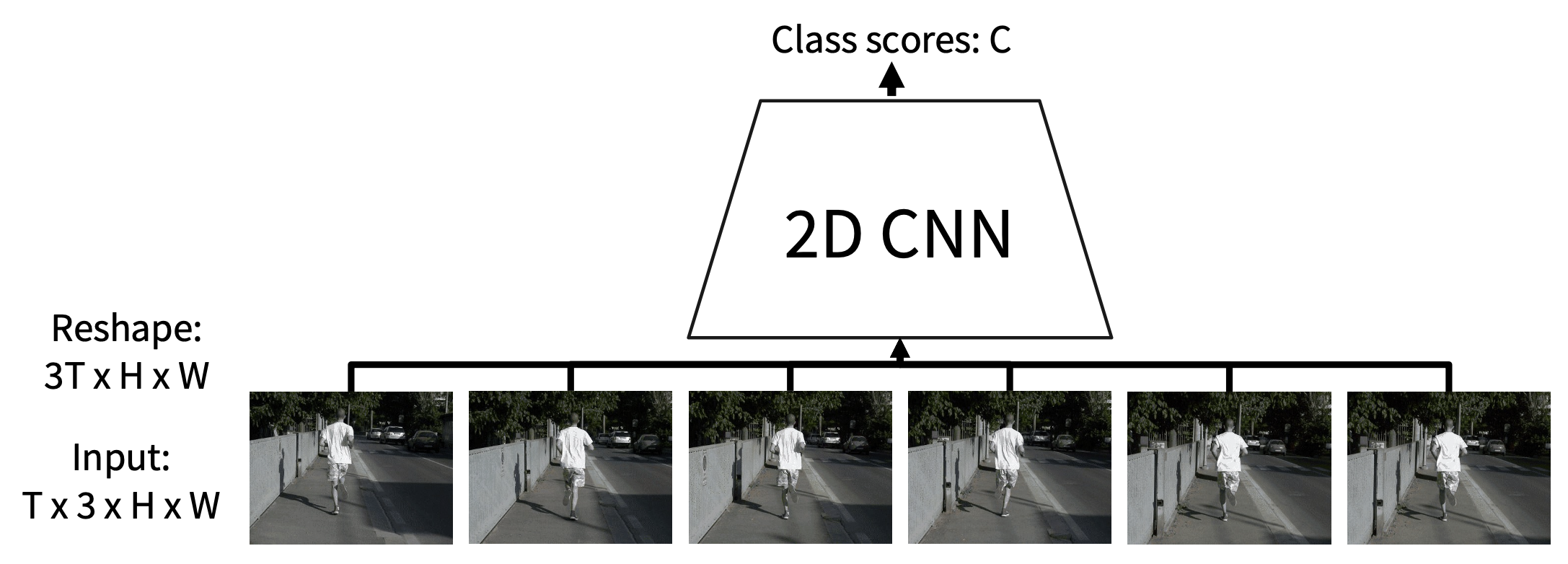
-
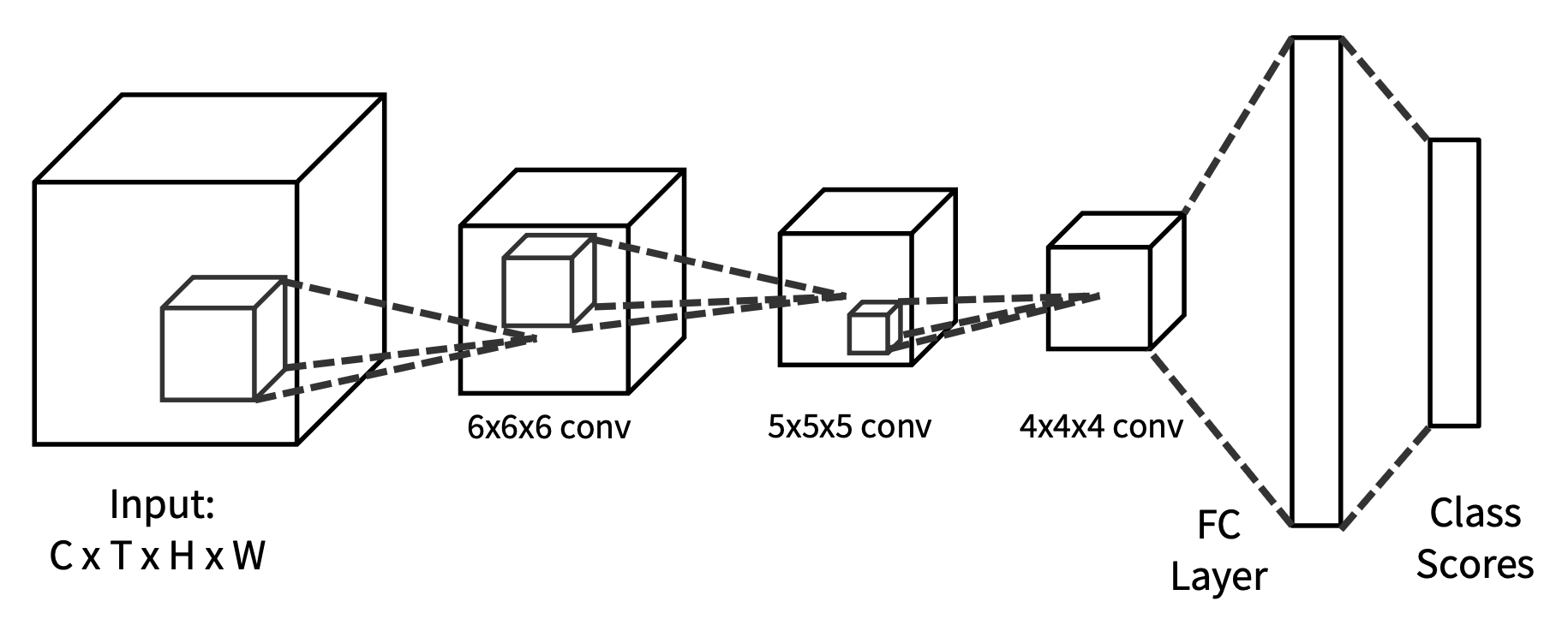
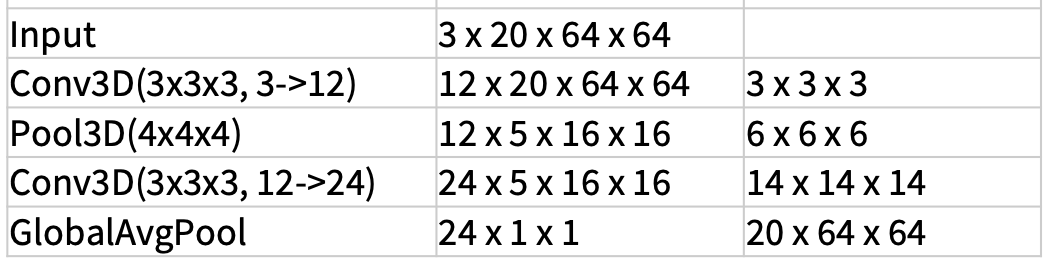
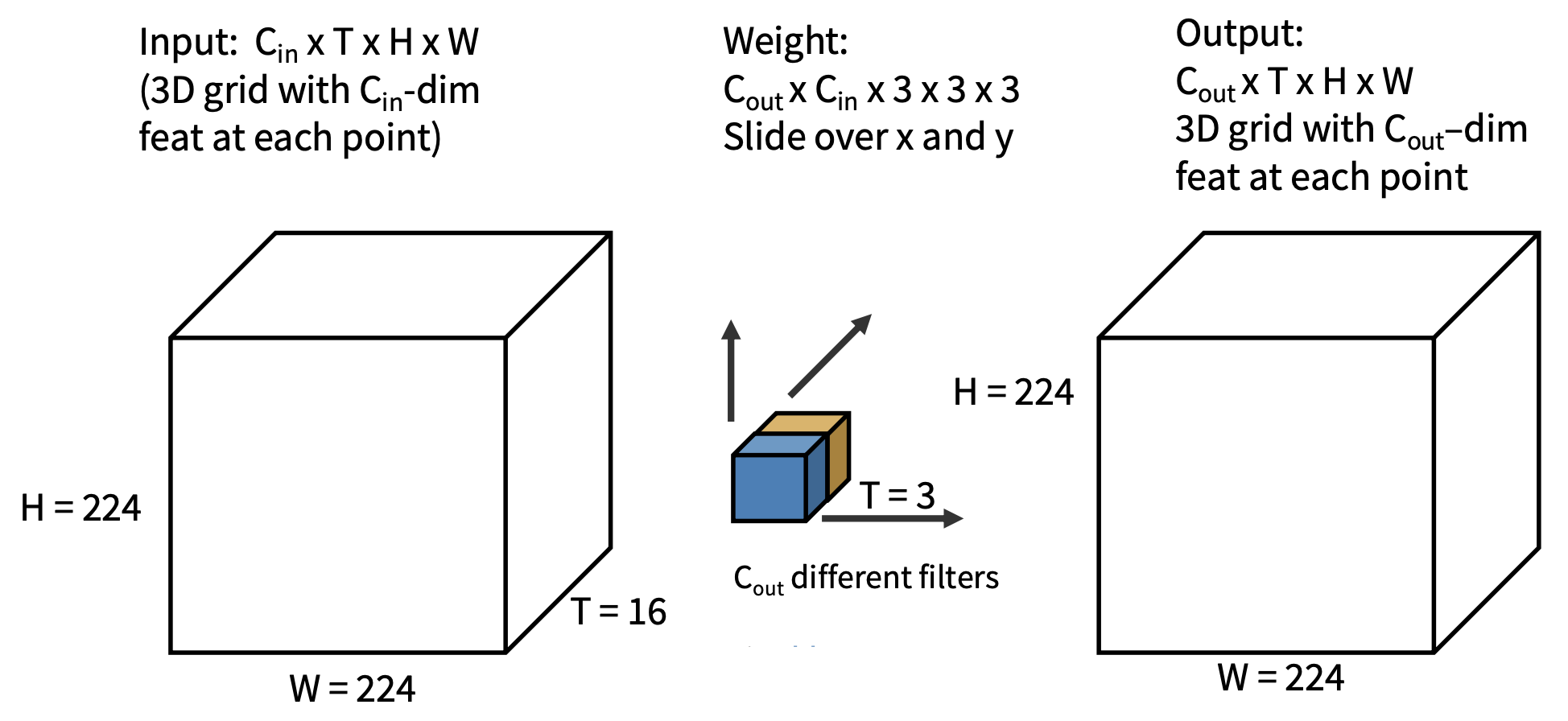
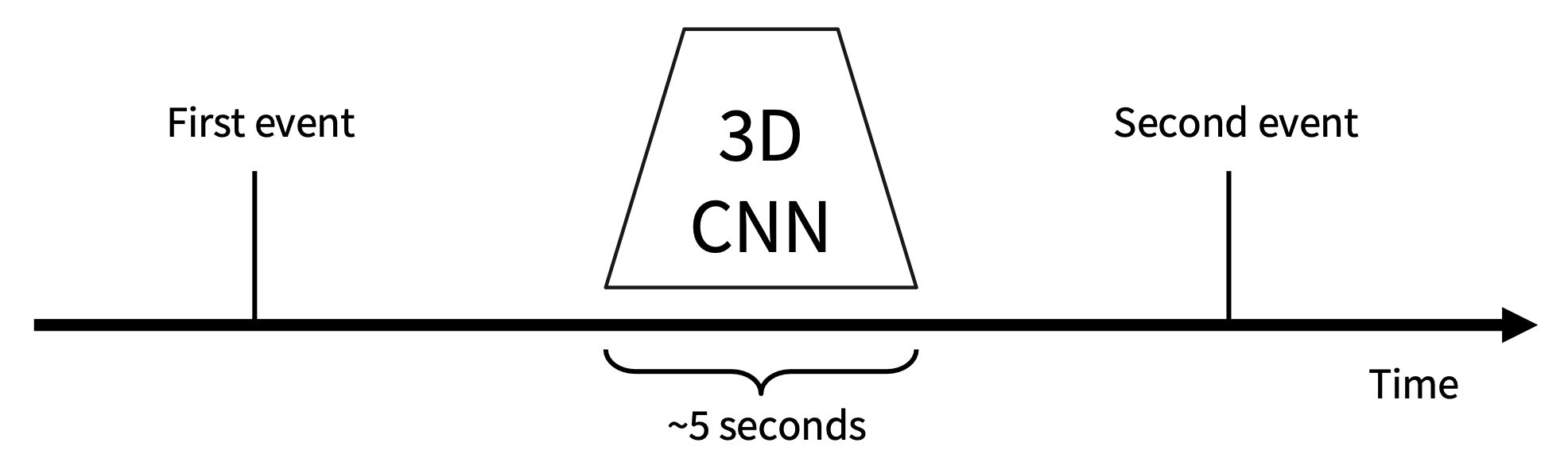
3D CNN
- 直觉:使用卷积和池化的 3D 版本,在网络过程中缓慢融合时间信息
- 网络的每一层是一个 4D 张量(D x T x H x W)
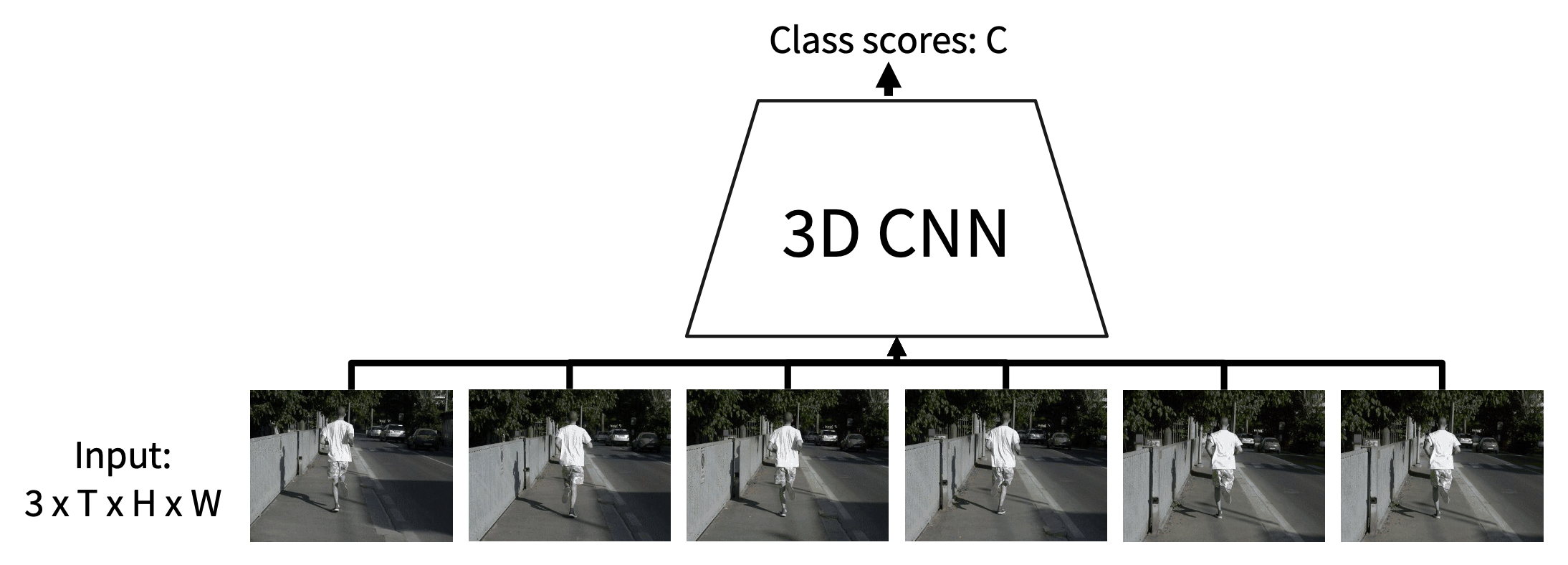
-
3D 卷积
后三种方法的比较
空间上构建慢,在时间快结束的最后一次性完成
空间上构建慢,在时间一开始一次性完成
在时间和空间上构建都很慢——“慢融合 (slow fusion)”
进一步比较早期融合与 3D CNN
- 没有时间平移不变性,需要学习不同时间下相同运动的独立滤波器
- 具有时间平移不变性,因为每个滤波器随时间滑动
- 第一层滤波器的形状为 3(RGB)x 4(帧)x 5 x 5(空间
) ,可用于可视化视频片段
样例视频数据集:Sport-1M

上述方法在这个数据集上的表现:
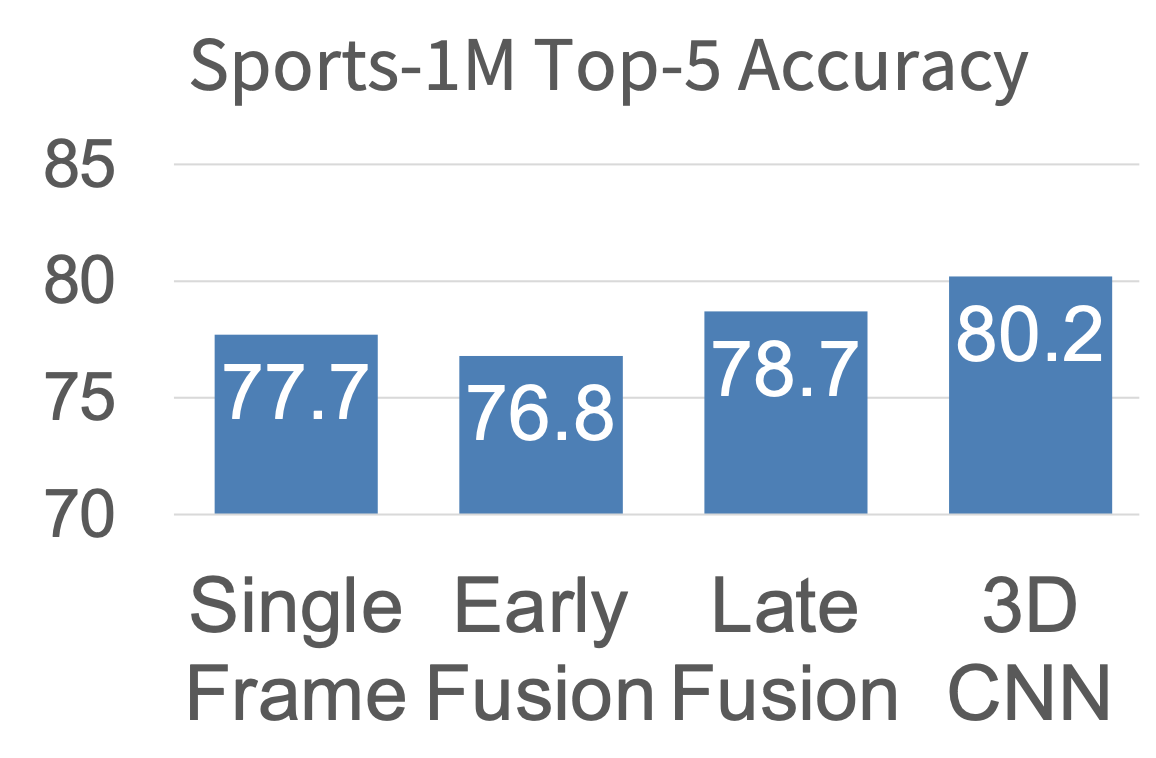
- 单帧模型表现不错,总是最先尝试
- 自从 2014 年开始,3D CNN 的表现已经提升了很多
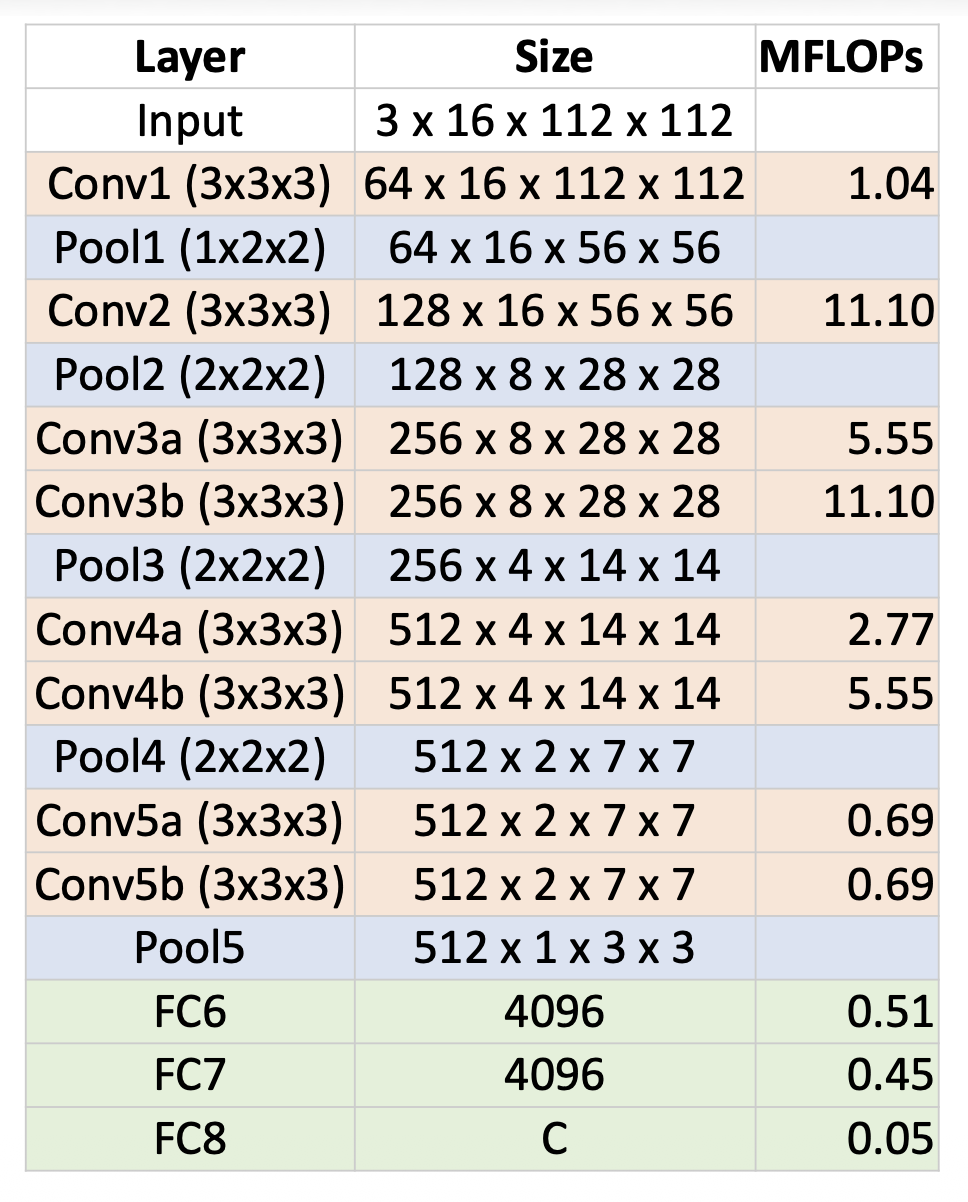
一种更先进的方法是 C3D,它是 3D CNNs 的 VGG
- 3D CNN,所有卷积和池化的规模分别为 3x3x3 和 2x2x2(除 Pool1 为 1x2x2 外)
- 发布在 Sports-1M 上的预训练模型;许多人将其用作视频特征提取器
-
问题:3x3x3 卷积成本很高,对比其他成本
- AlexNet:0.7 GFLOP
- VGG-16:13.6 GFLOP
- C3D:39.5 GFLOP(是 VGG 的 2.9 倍
! )
-
表现超过之前 4 种方法(
力大砖飞)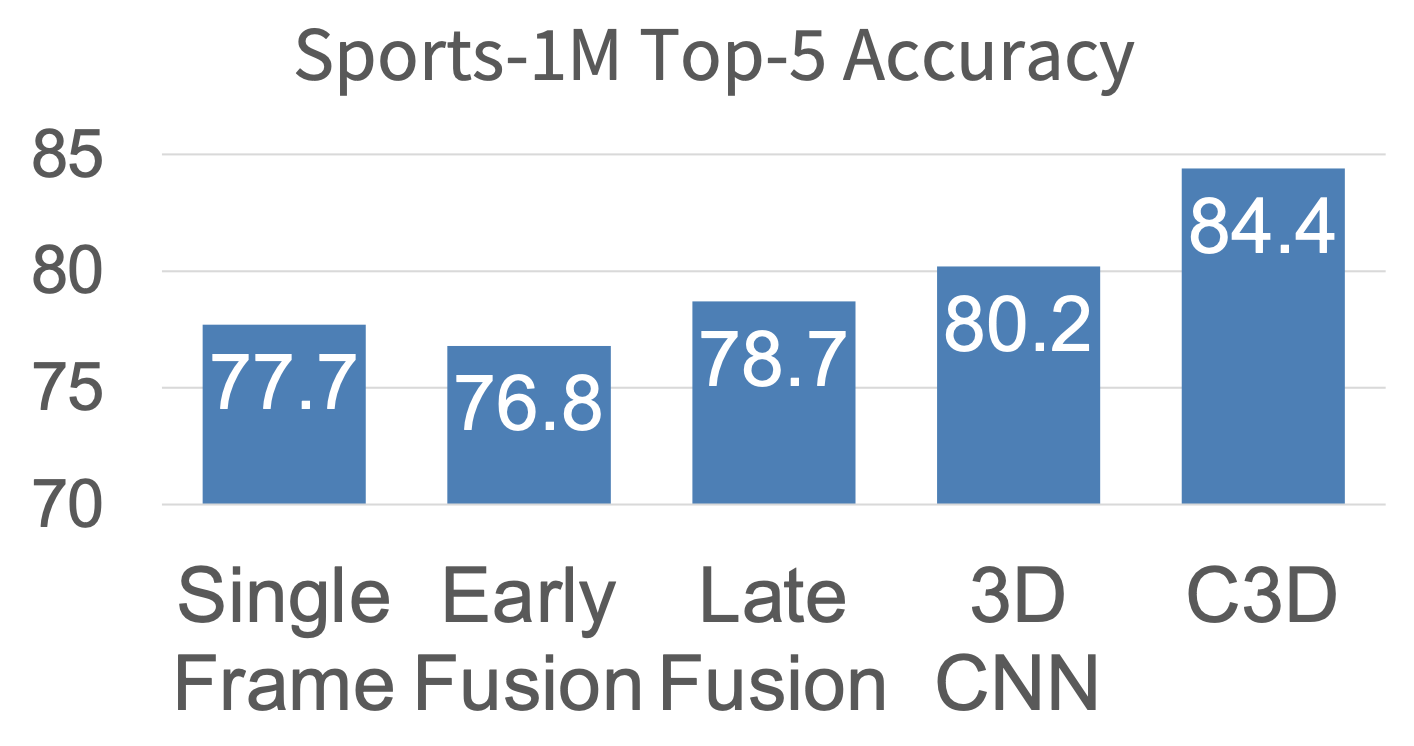
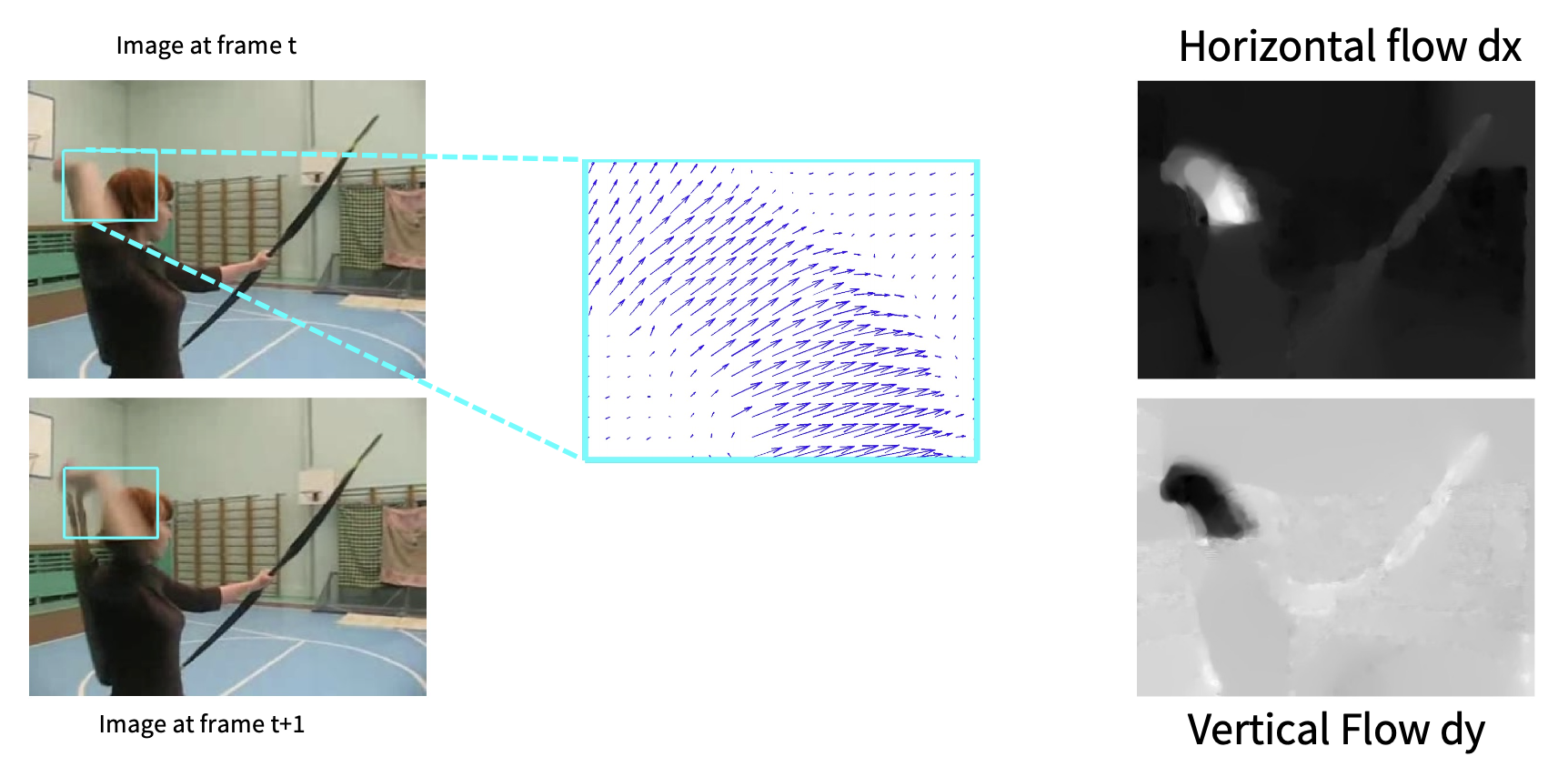
Measuring Motion: Optical Flow⚓︎
我们可以仅使用运动信息轻松识别动作。
对机器而言,测量运动需要利用光流(optical flow) 完成。
- 光流提供了图像 \(I_t\) 和 \(I_{t+1}\) 之间的位移场 \(F\)
-
告诉每个像素在下一帧将移动到何处:
\[ \begin{aligned} F(x, y) & = (dx, dy) \\ I_{t+1}(x+dx, y+dy) & = I_t(x, y) \end{aligned} \] -
光流强调了局部运动
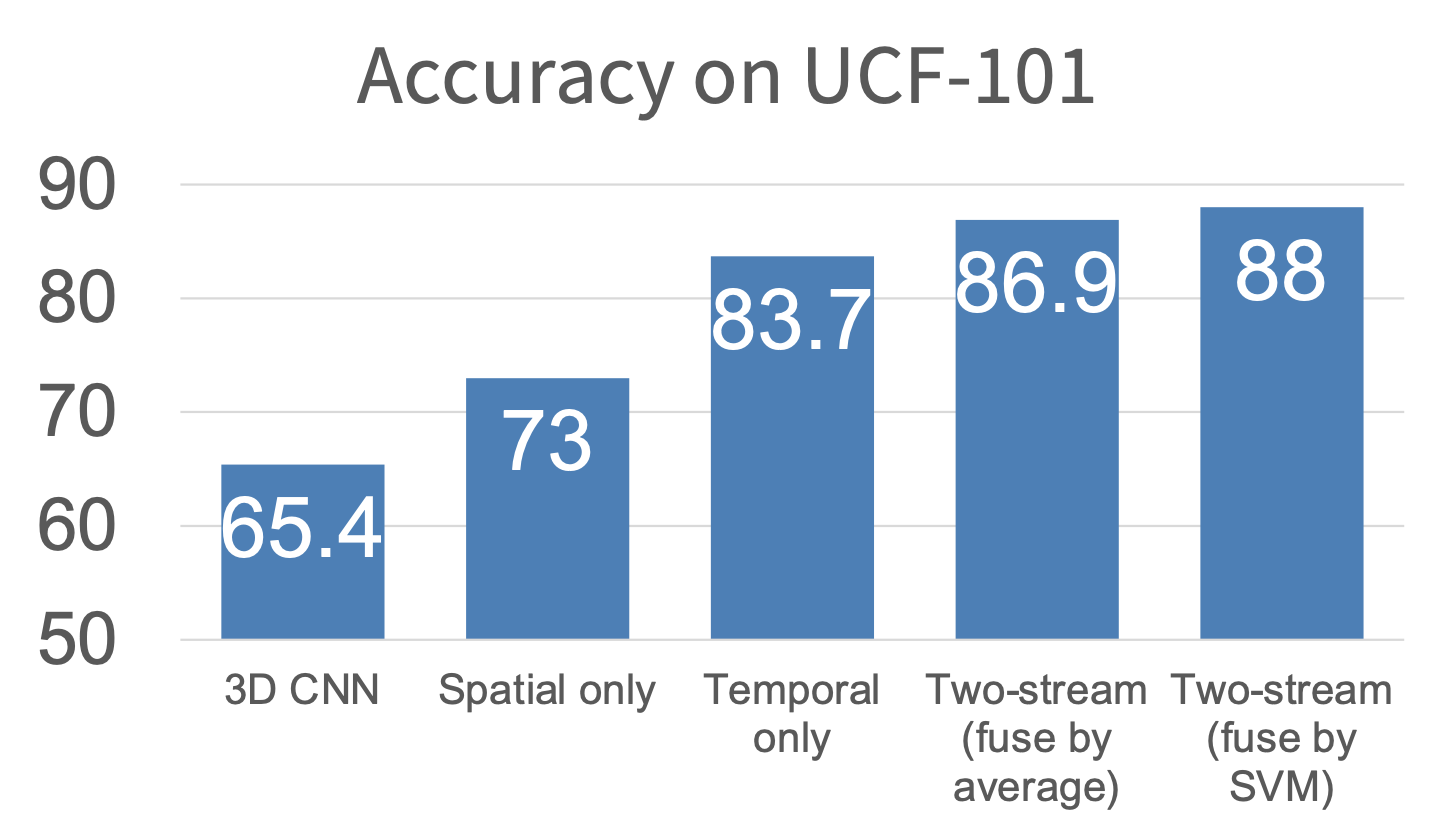
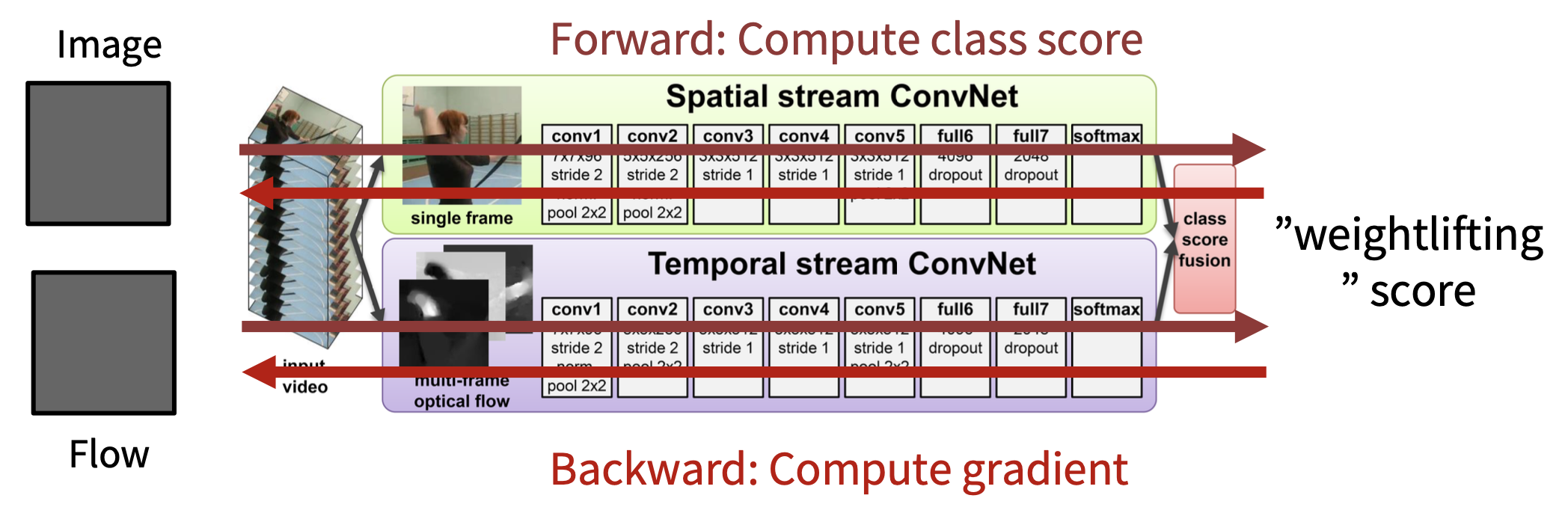
Separating Motion and Appearance: Two-Stream Networks⚓︎
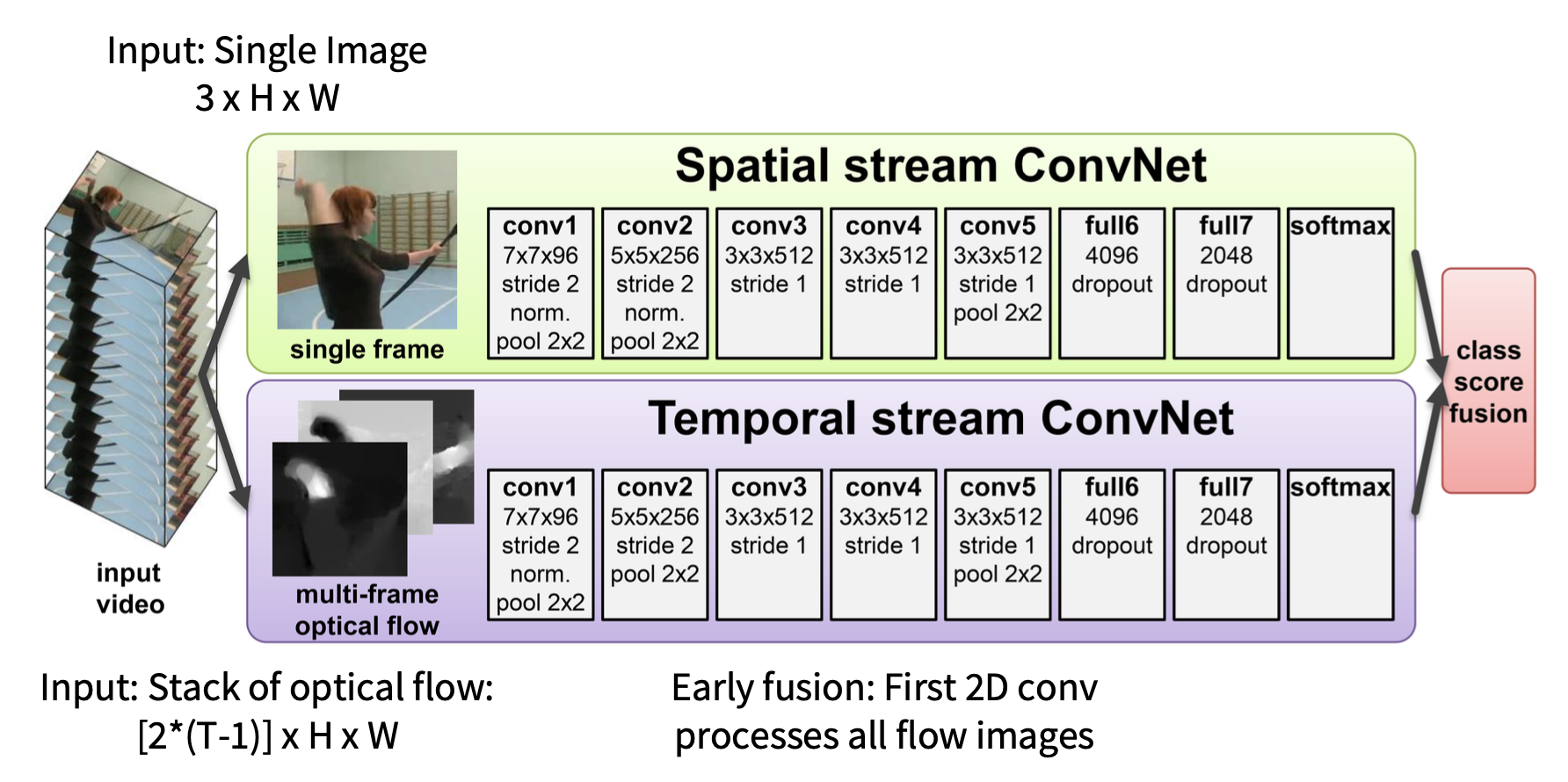
效果比前面介绍的方法都要好:
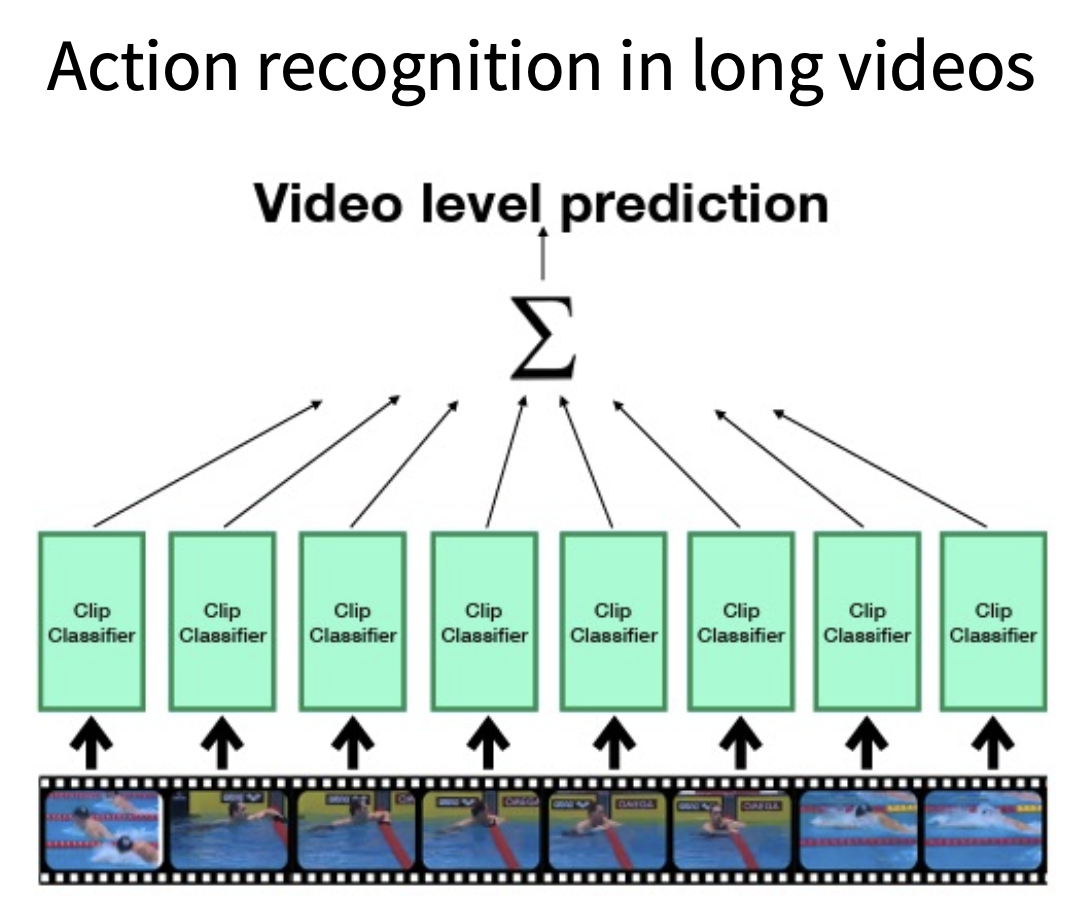
Modeling Long-Term Temporal Structure⚓︎
到目前为止,所有的时序 CNNs 仅对非常短的片段(约 2-5 秒)中的帧之间的局部运动进行建模,那么如何处理长视频呢?
我们把长视频看成一个序列,那么很自然地就会想到用 RNN 来处理这个问题,那就来试试看吧!
- 先通过(2D / 3D)CNN 提取特征
- 使用 RNN 处理局部特征
- 多对一:每个视频只有一个输出;或者多对多:每个视频帧都有一个输出
- 有时不要在 CNN 上使用反向传播,以节省内存
- 预训练,将其作为特征提取器
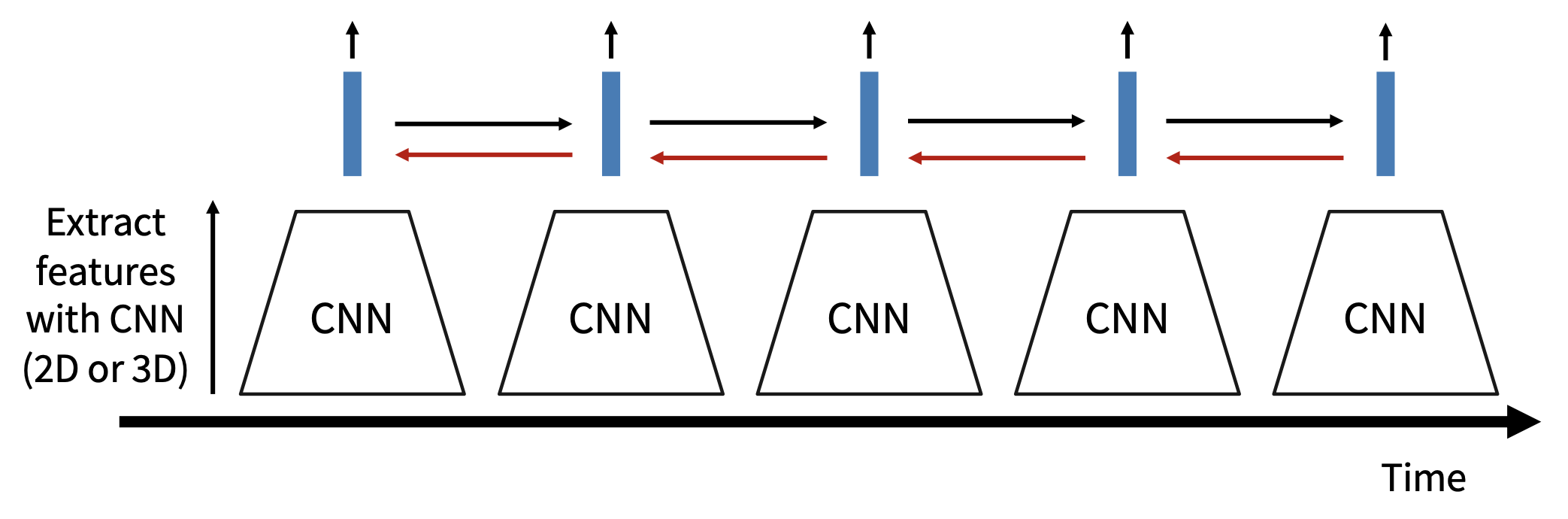
- CNN 内部:每个值都是关于固定时间窗口(局部时间结构)的函数
- RNN 内部:每个向量都是关于所有先前向量的函数(全局时间结构)
Spatio-Temporal Self-Attention⚓︎
我们可以采用和多层 RNN 类似的想法来改进处理视频的结构——于是我们得到了一个叫做递归卷积网络(recurrent convolutional network) 的东西!
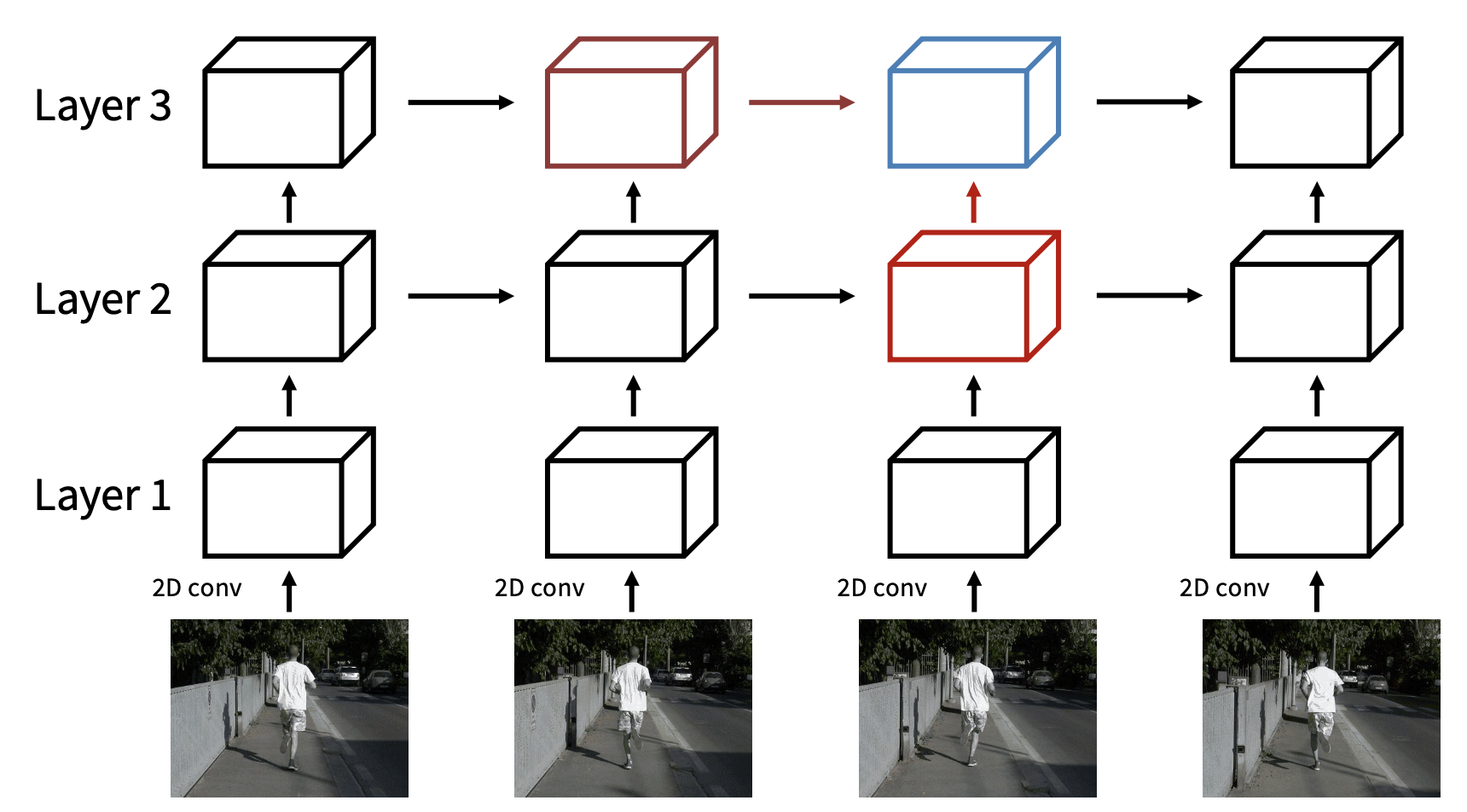
- 整个网络使用 2D 特征图(规模为 CxHxW)
-
每个部分依赖两个输入:来自同层的前一个时间步的输出,以及前一层在相同时间步的输出
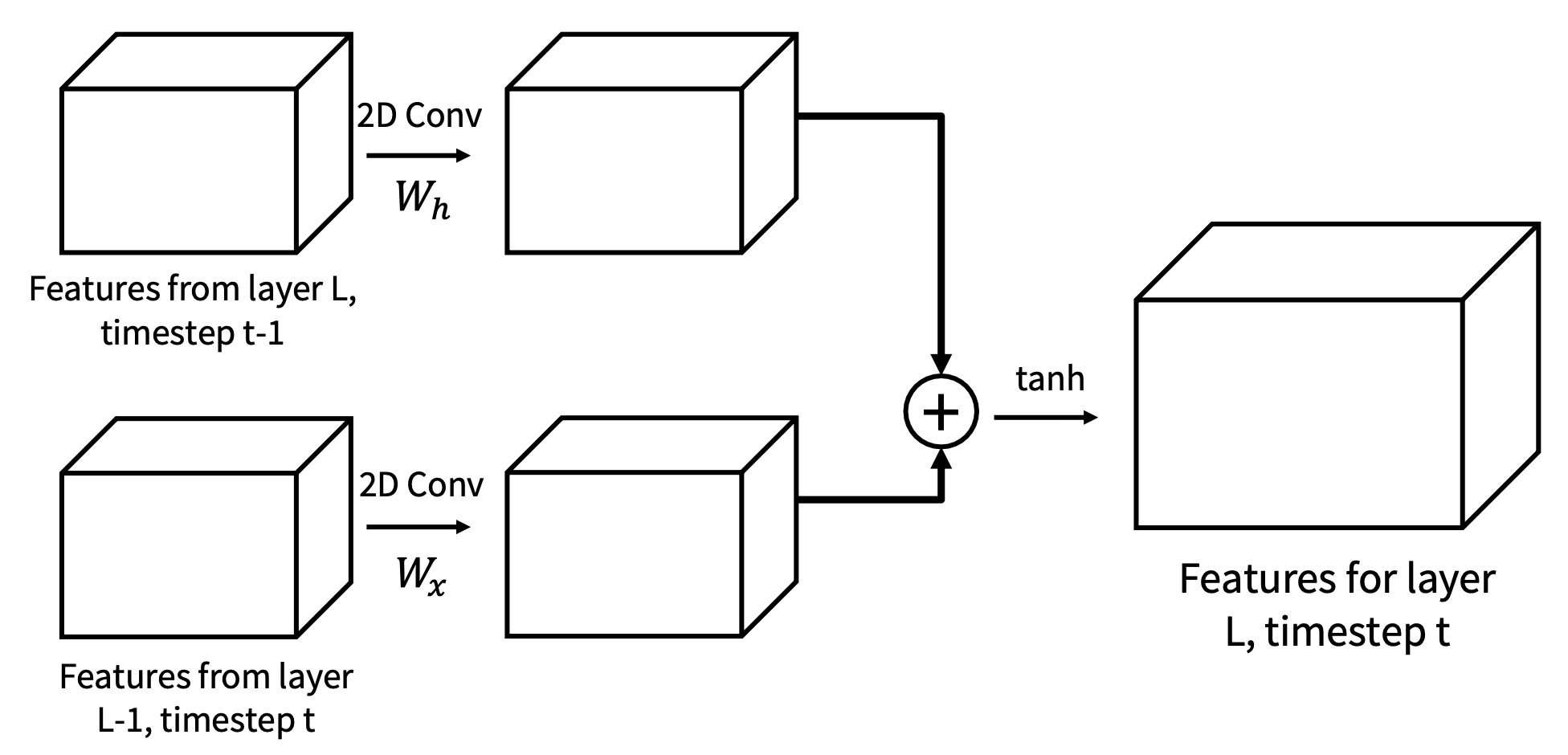
- 使用 2D 卷积替代所有的矩阵乘法
-
每层采用不同权重,跨时间共享权重
我们成功结合了 CNN 和 RNN 的优点,得到了递归 CNN:
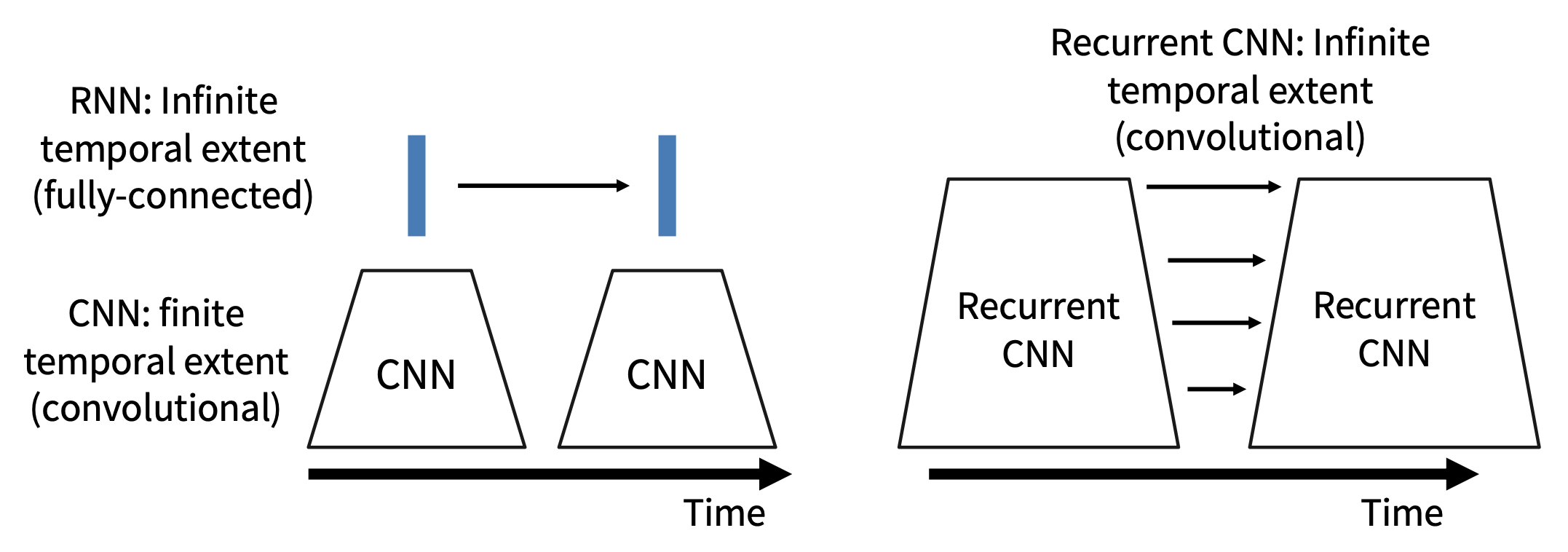
但我们还得面对另一个问题:RNN 在长序列上速度慢(因为 RNN 无法并行计算
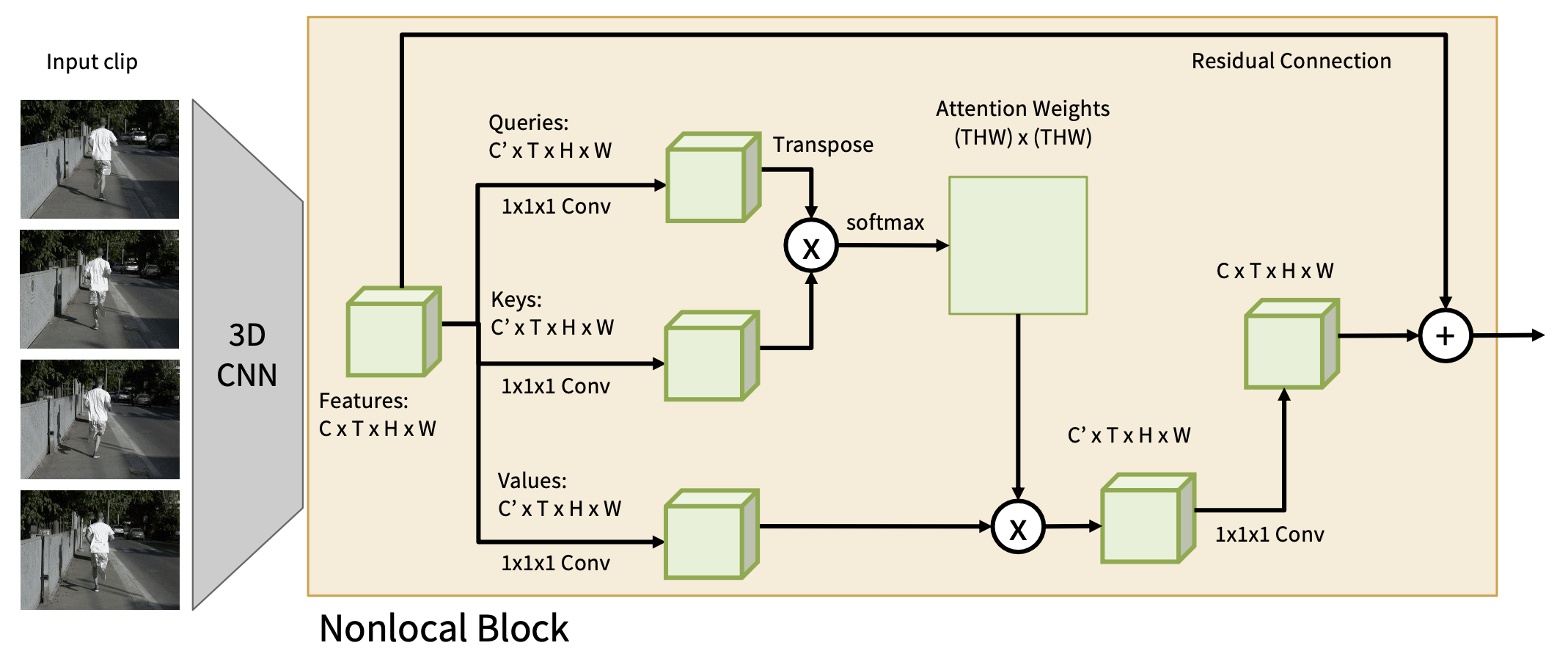
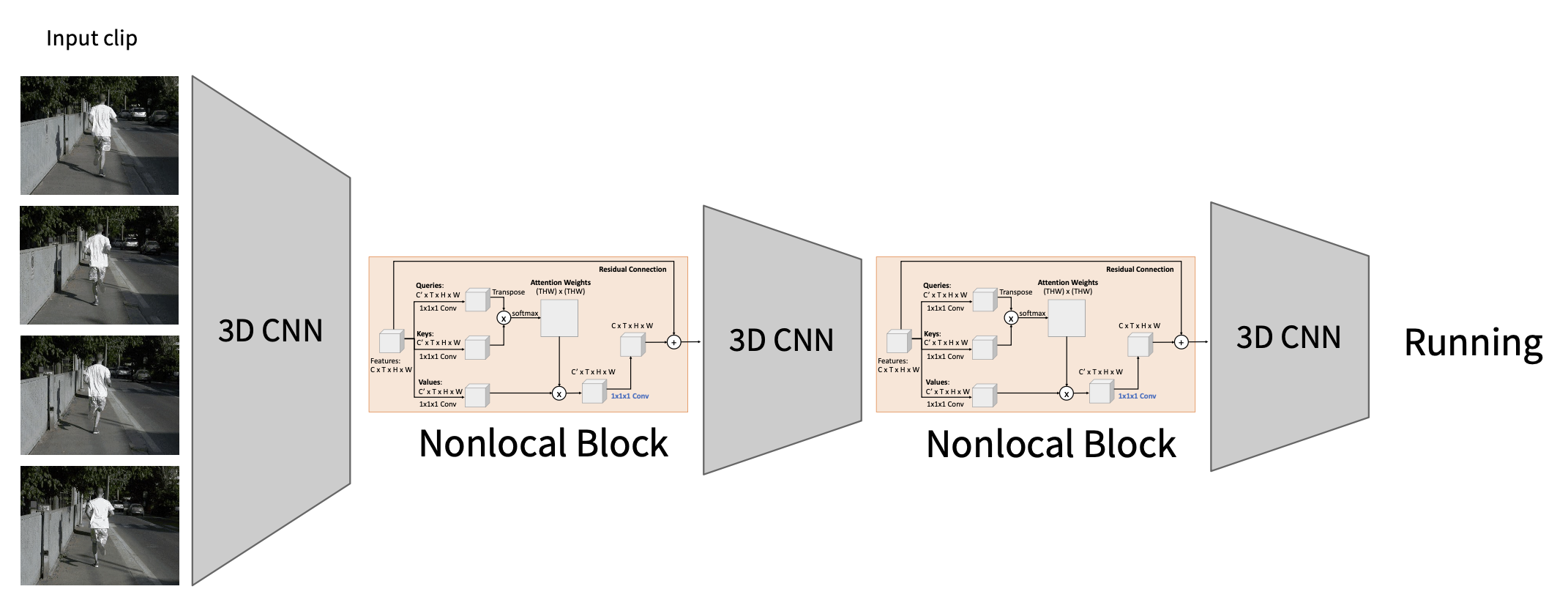
我们可以将非局部块添加到现有的 3D CNN 架构中。但最佳的 3D CNN 架构是什么呢?
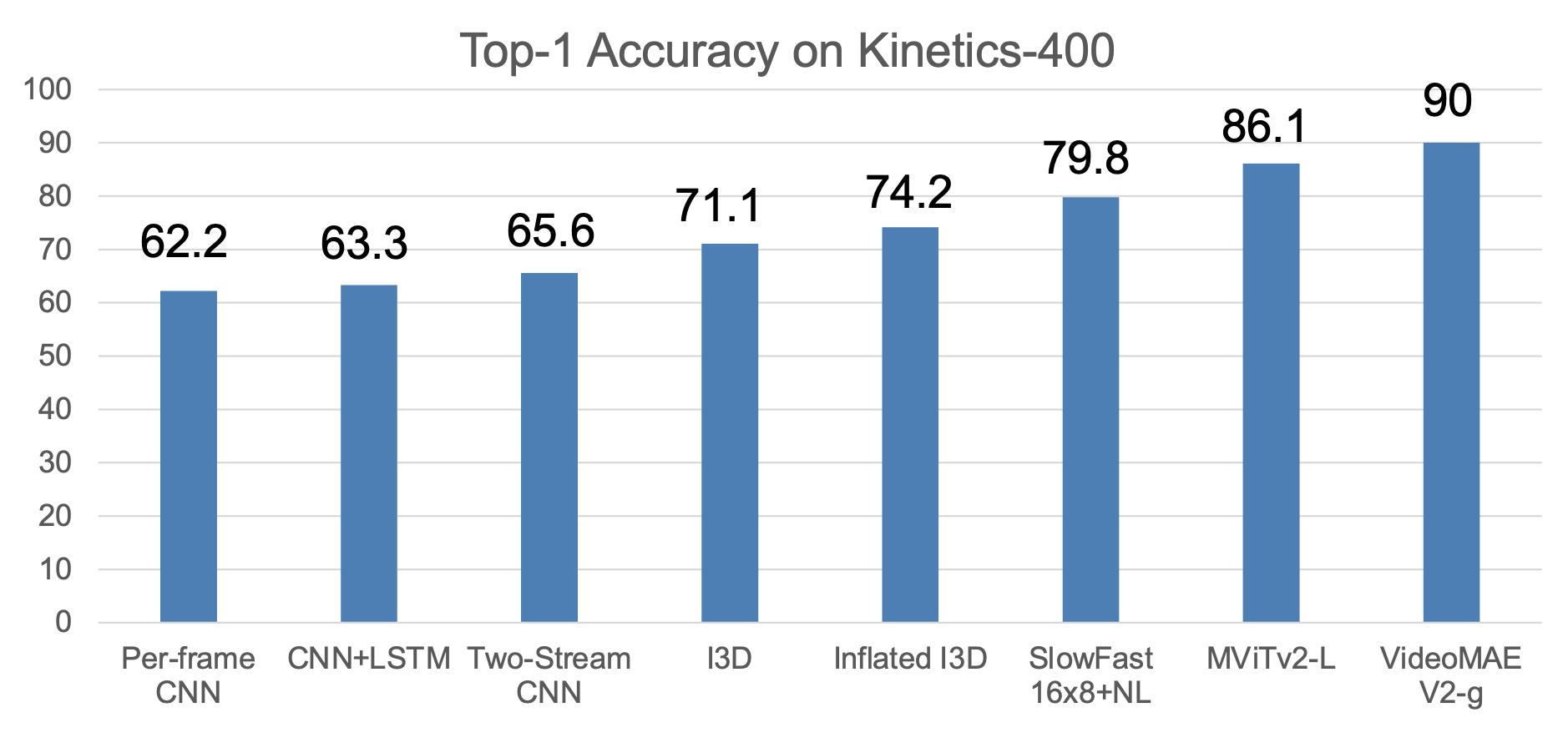
Inflating 2D Networks to 3D (I3D)⚓︎
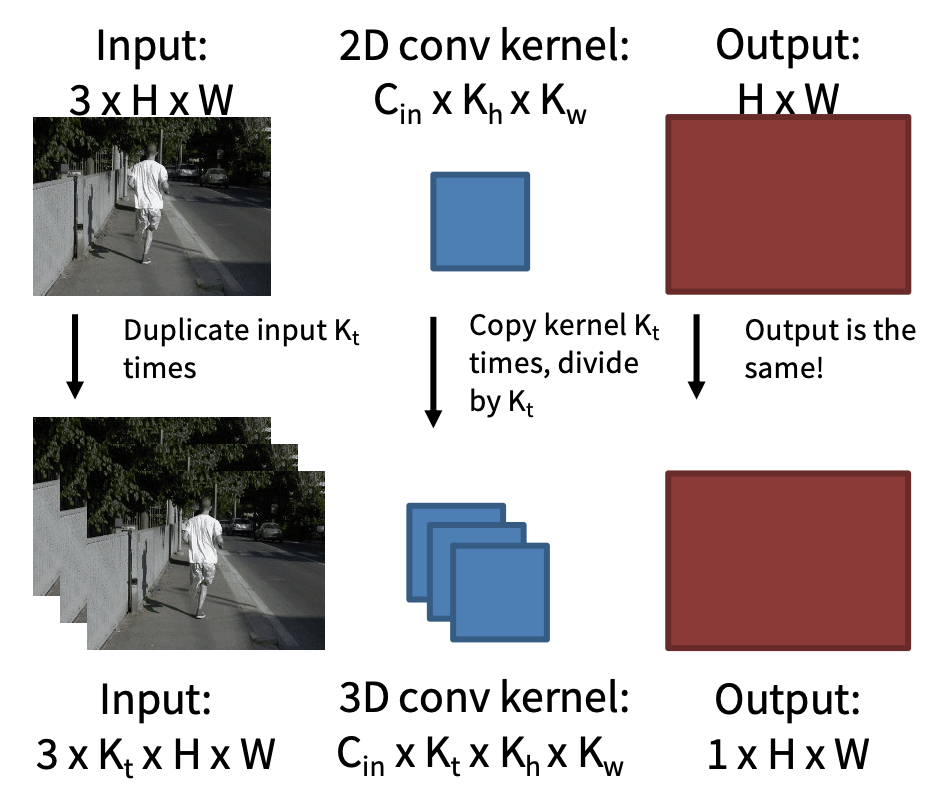
关于图像架构的研究已经有很多了,所以我们不妨重用一些图像架构来处理视频。具体思路是:取一个 2D CNN 架构,用 3D 的规模为 \(K_t \times K_h \times K_w\) 的版本替换 2D 的规模为 \(K_h \times K_w\) 卷积 / 池化层。
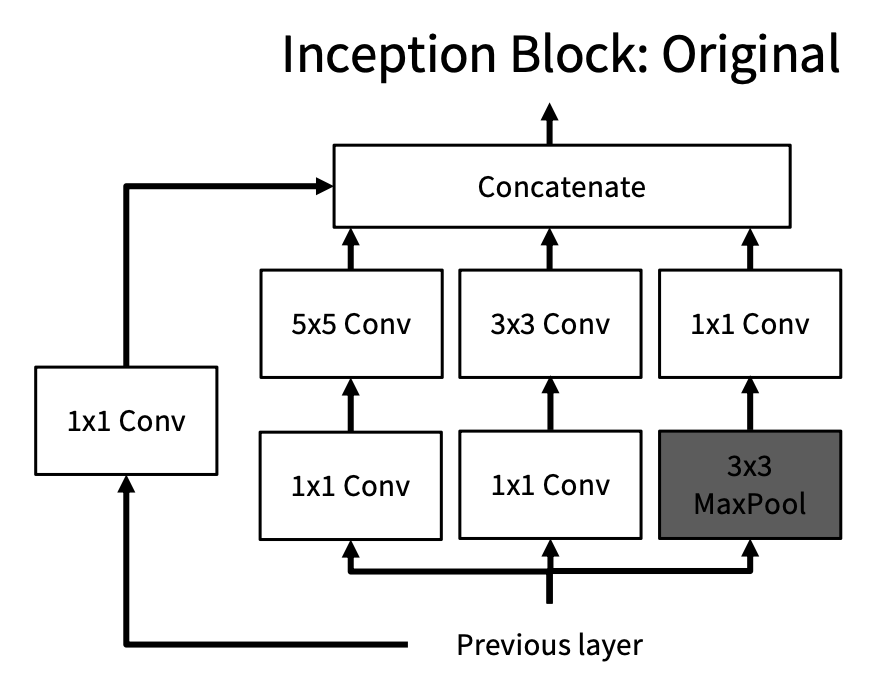
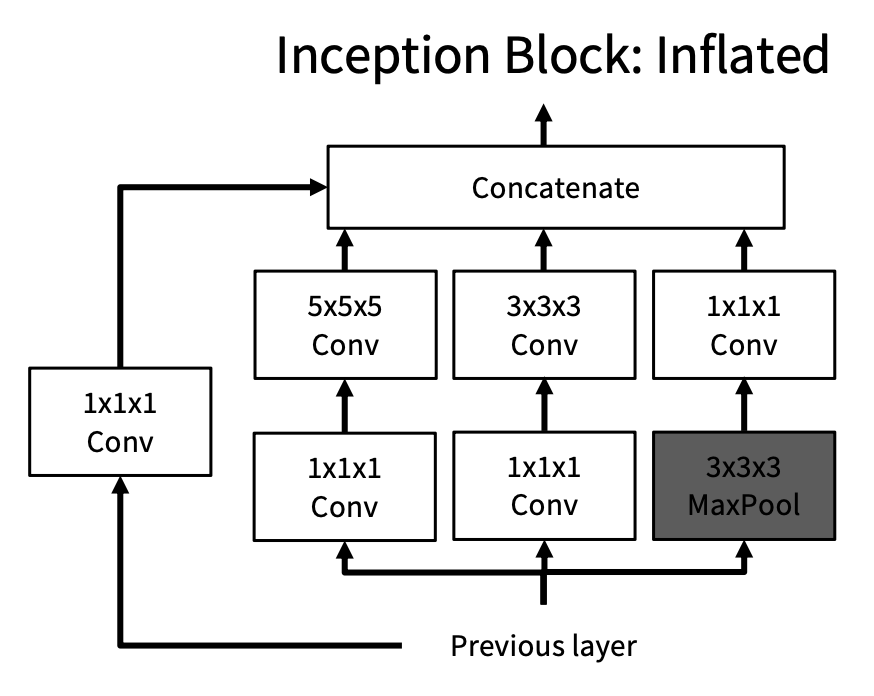
另外,我们可以使用 2D 卷积的权重来初始化 3D 卷积:在空间中复制 \(K_t\) 次并除以 \(K_t\)。这给出了与给定“常数”视频输入的 2D 卷积相同的结果。
表现:
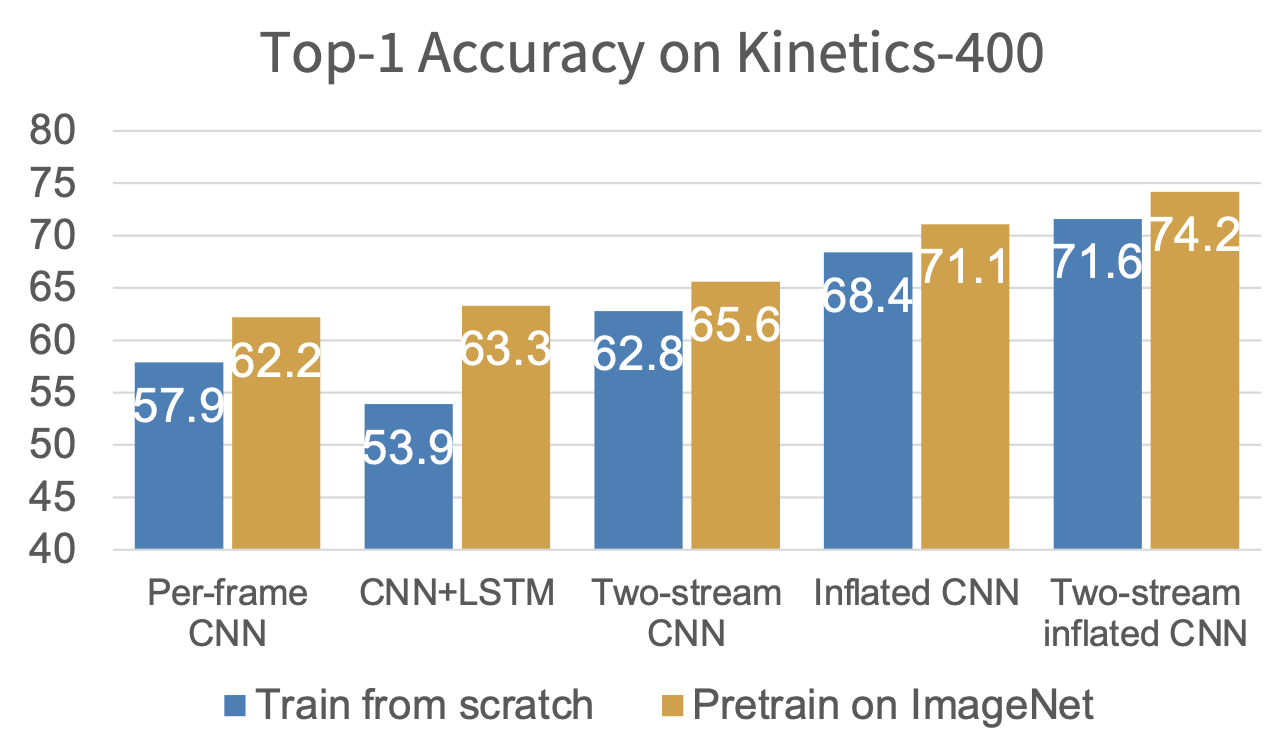
Vision Transformers for Video⚓︎
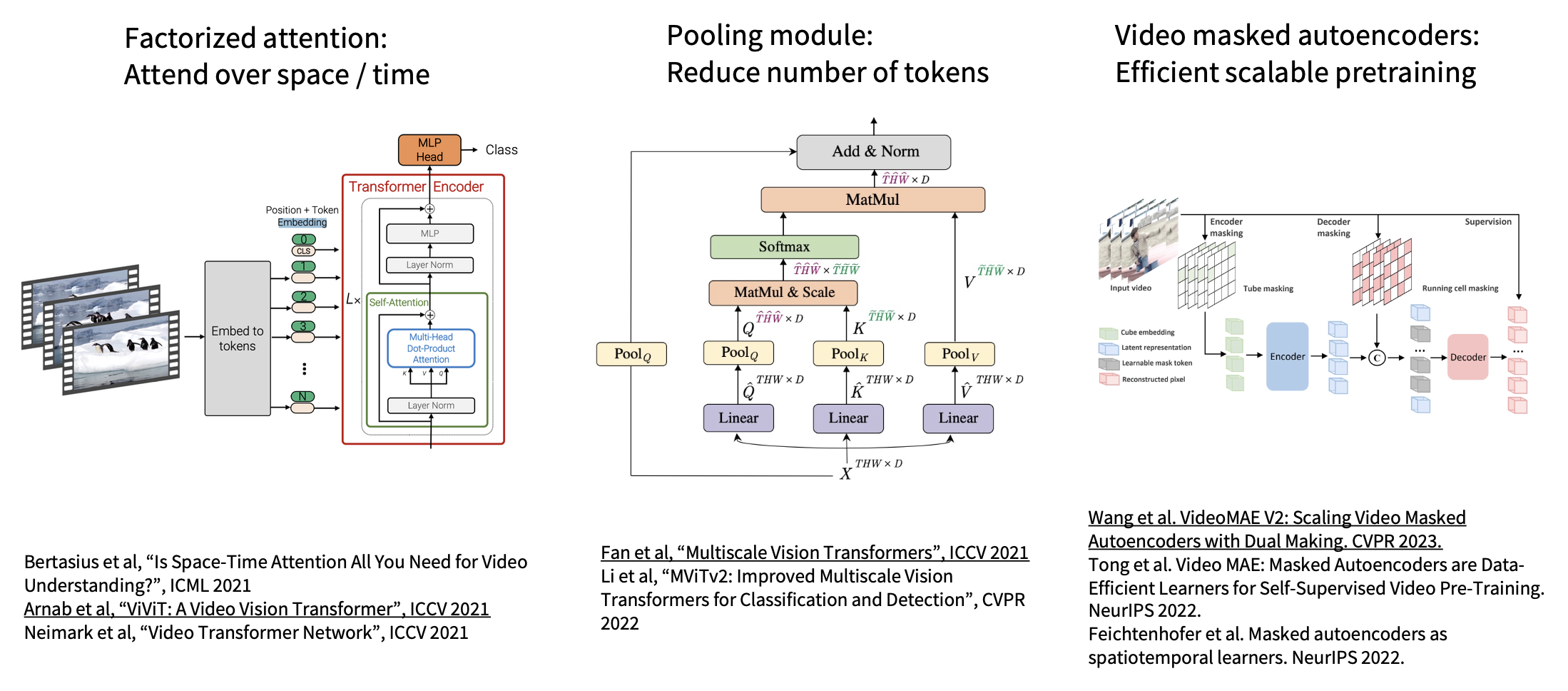
表现:
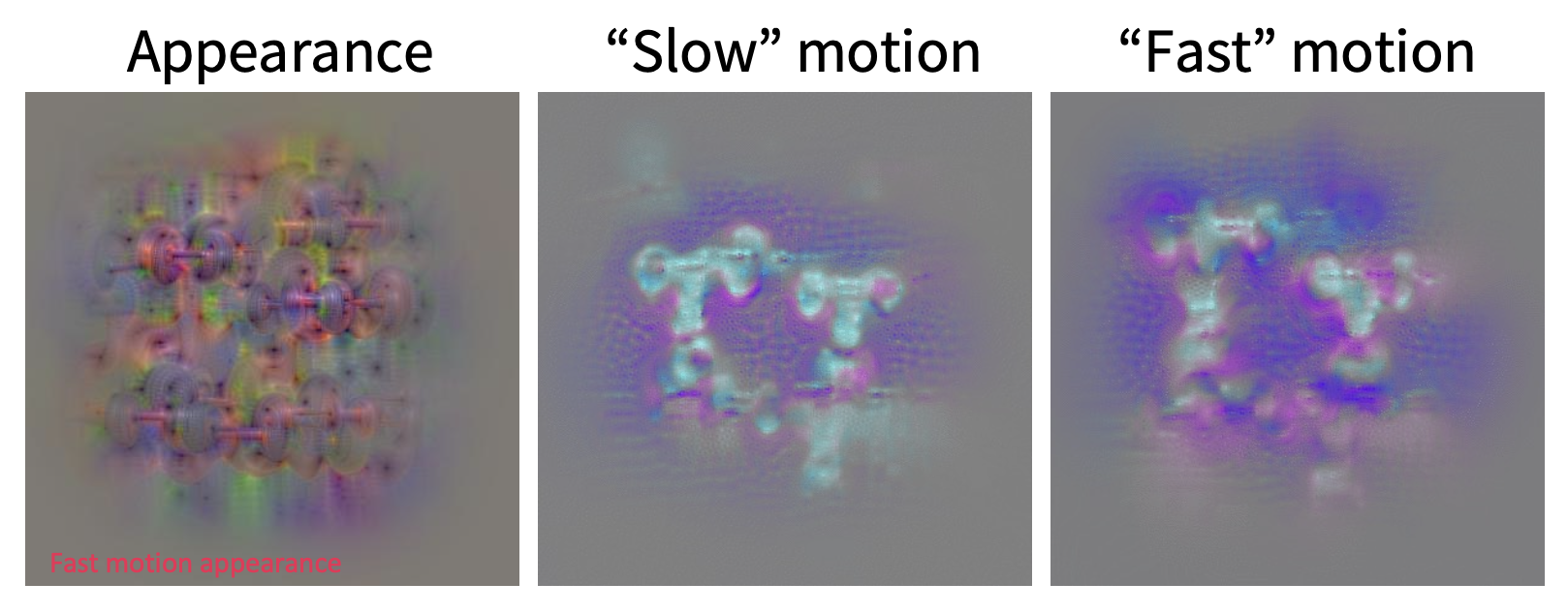
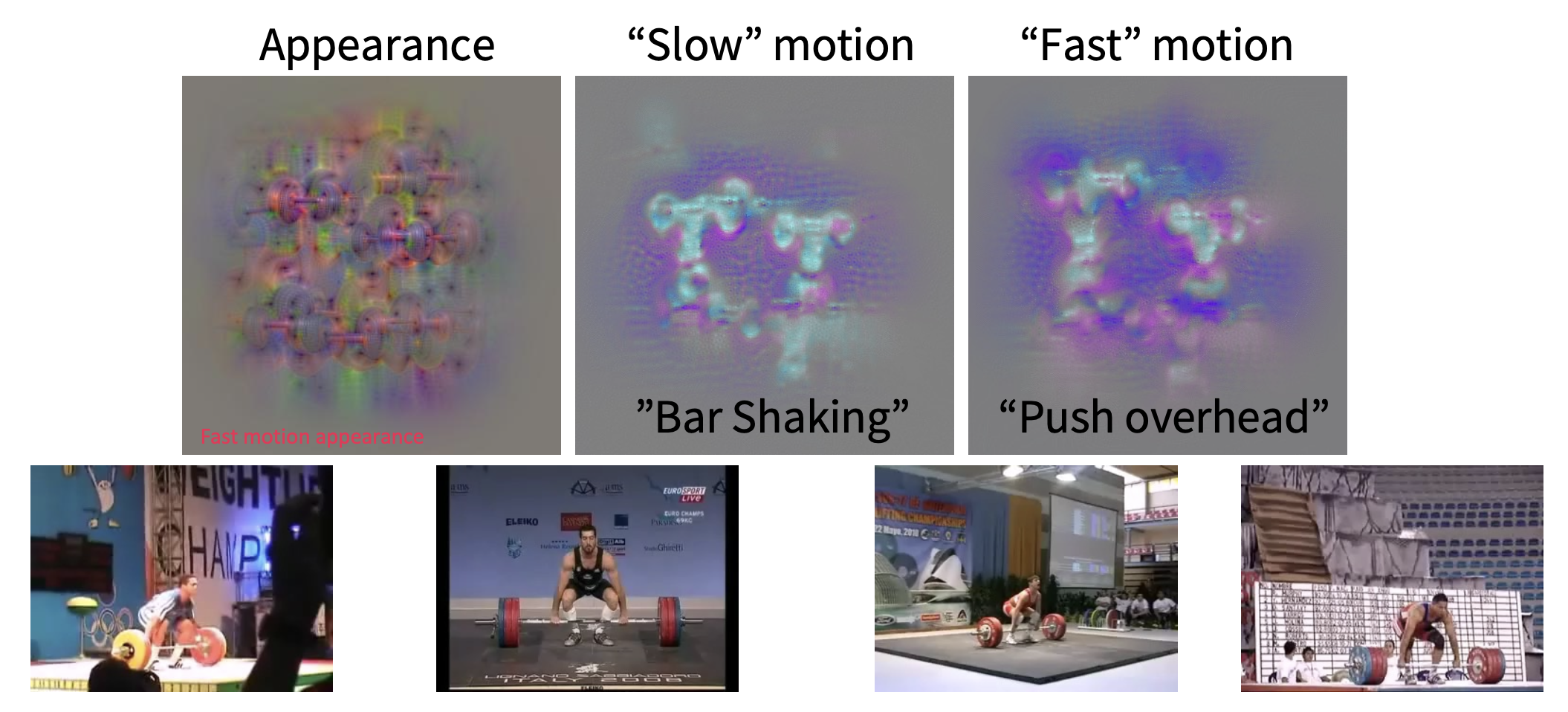
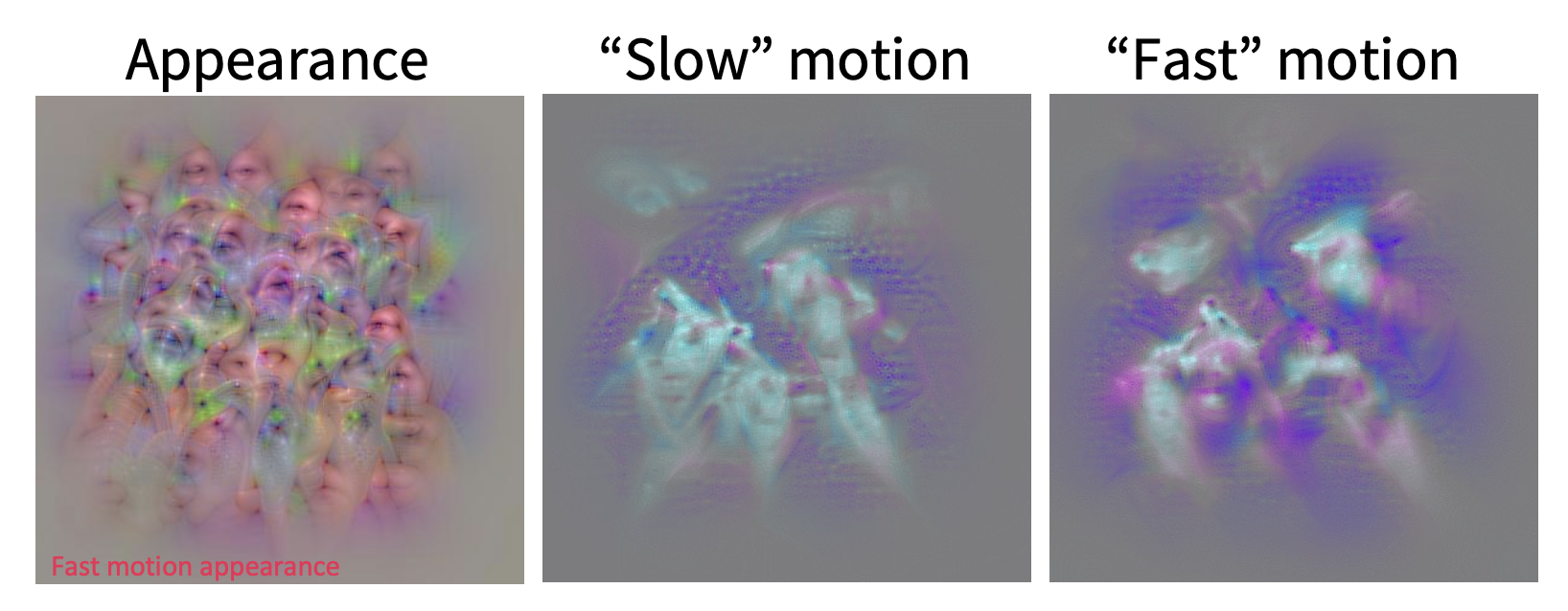
Visualizing Video Models⚓︎
- 添加一个用于鼓励空间上的平滑流动的项
- 调整惩罚,以区分“慢”和“快”动作
猜测动作

Temporal Action Localization⚓︎
时间动作定位(temporal action localization):

- 给定一段未剪辑的长视频序列,识别对应不同动作的帧
- 可以使用类似于 Faster R-CNN 的架构:首先生成时间建议,然后进行分类
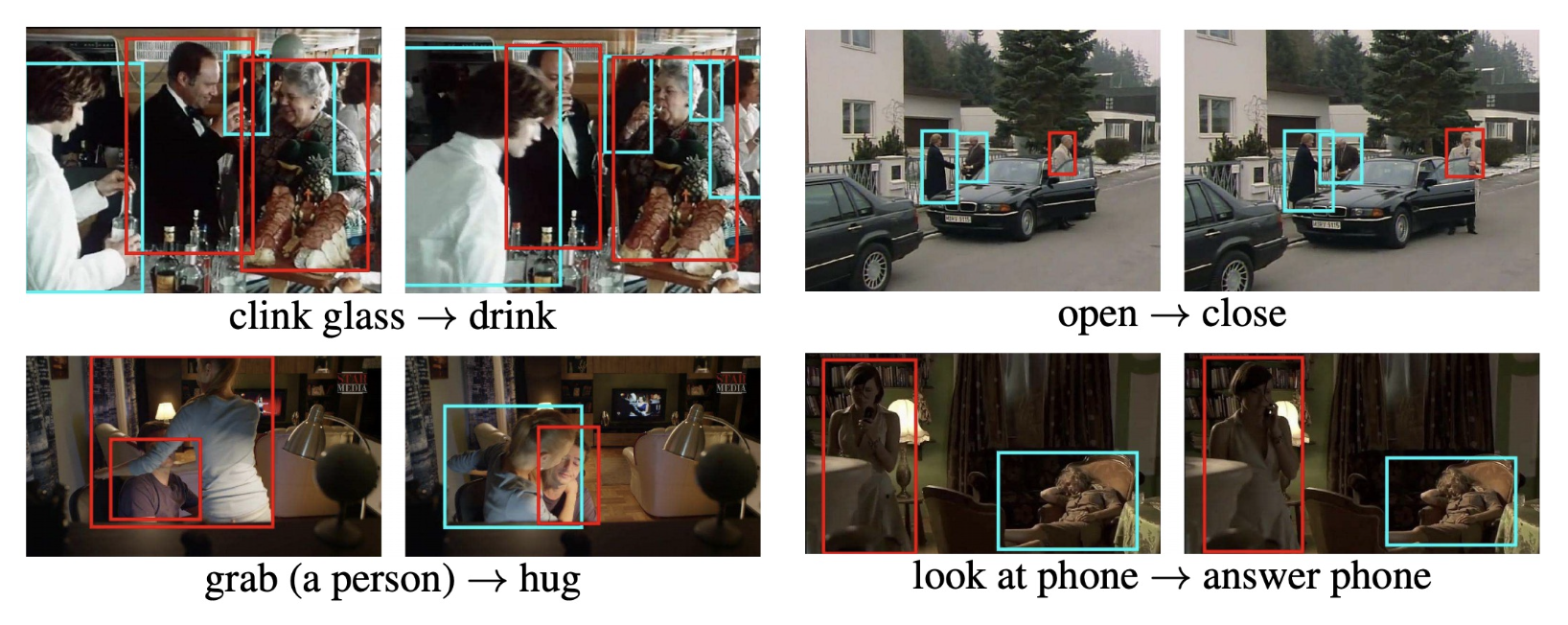
Spatio-Temporal Detection⚓︎
时空检测(spatio-temporal detection):给定一段未剪辑的长视频,检测空间和时间中所有的人,并对他们正在执行的活动进行分类。
一些来自 AVA 数据集的例子:
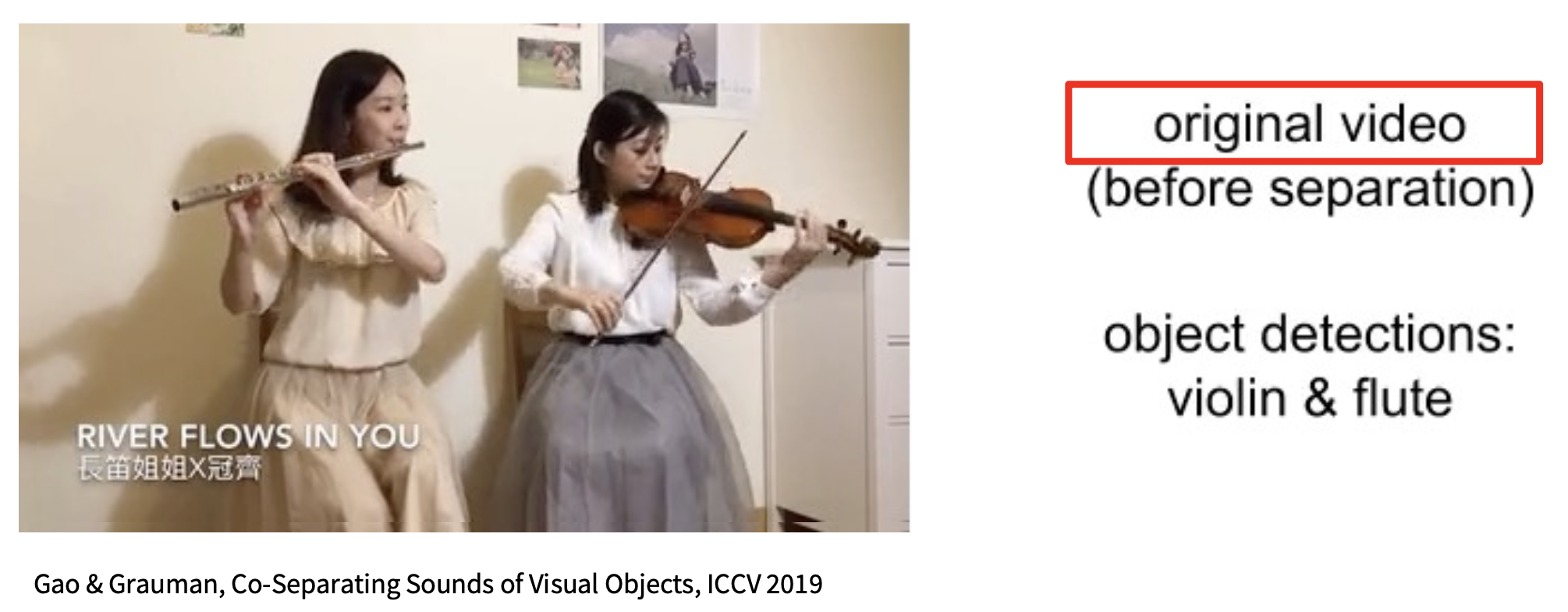
Applications⚓︎
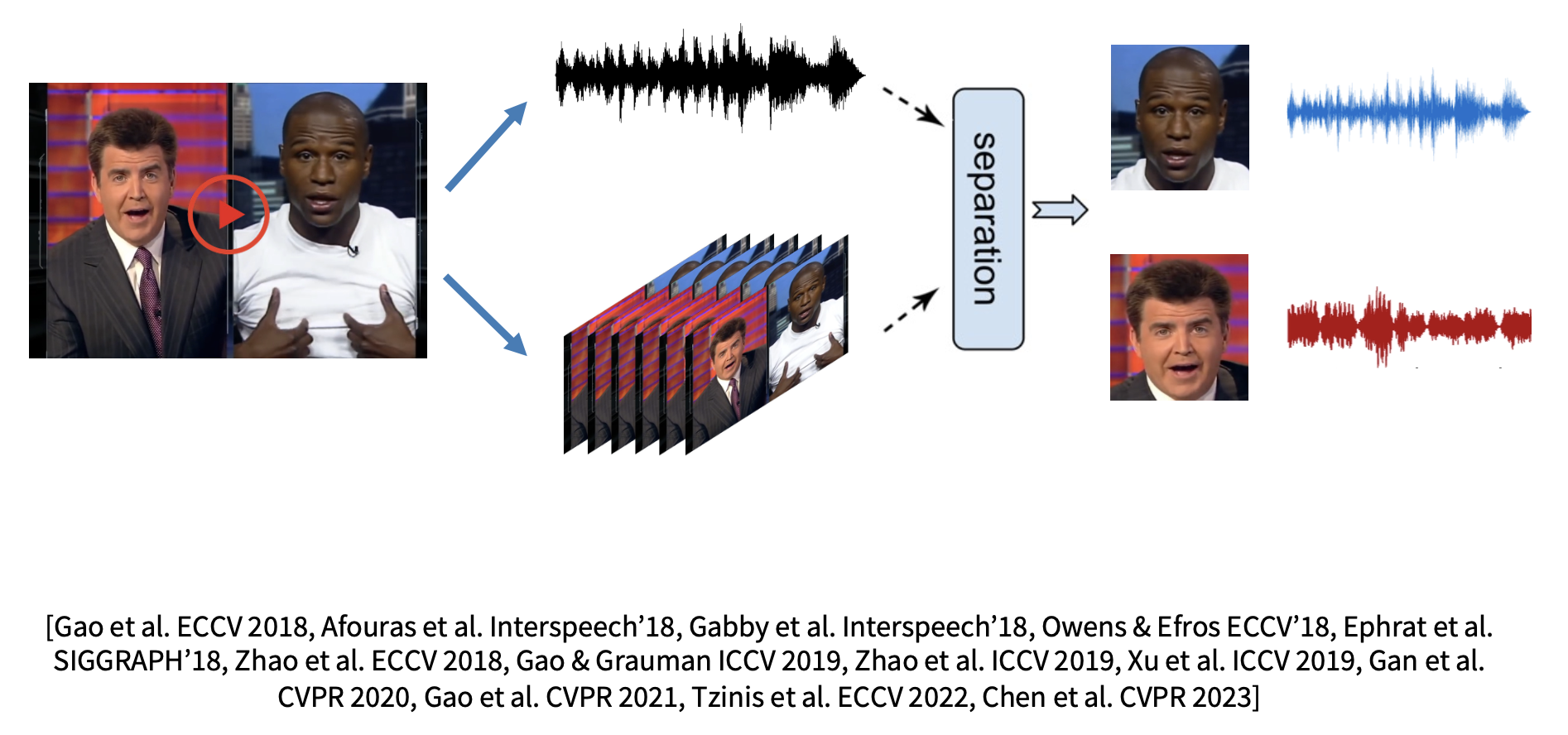
在 100K 个未标记的多源视频剪辑上进行训练,然后在新视频上分离音频。
评论区