3D Deep Learning⚓︎
约 1948 个字 预计阅读时间 10 分钟
3D Reconstruction⚓︎
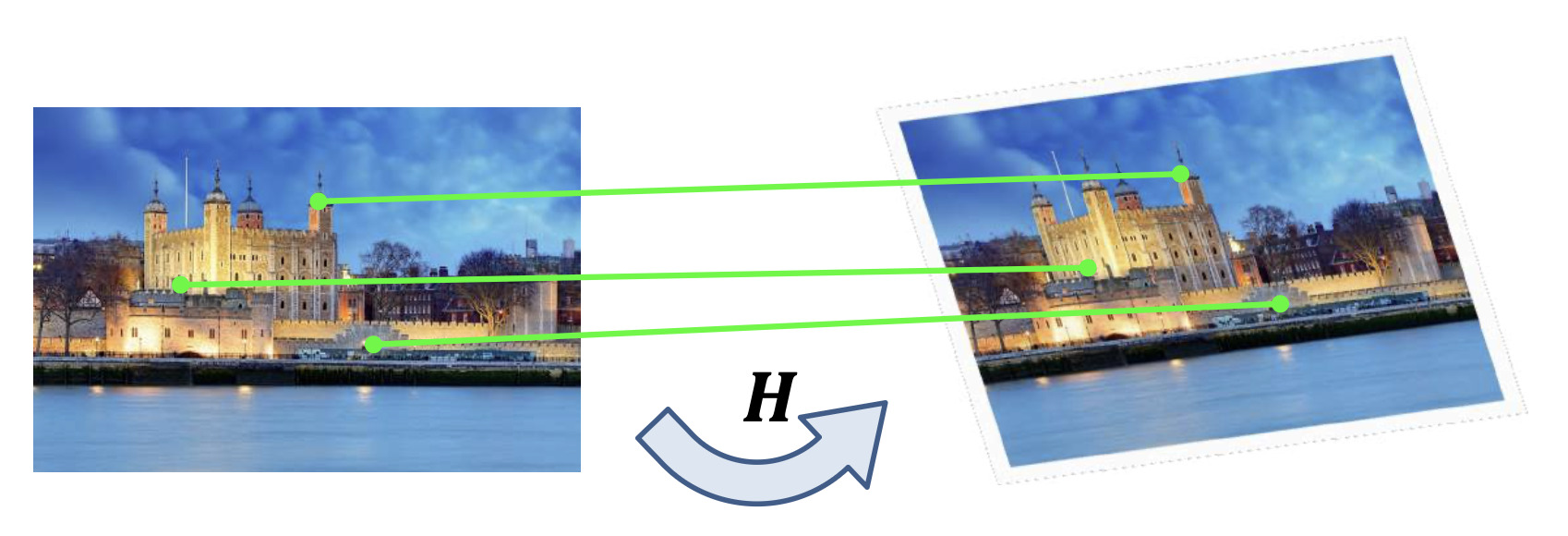
Feature Mapping⚓︎
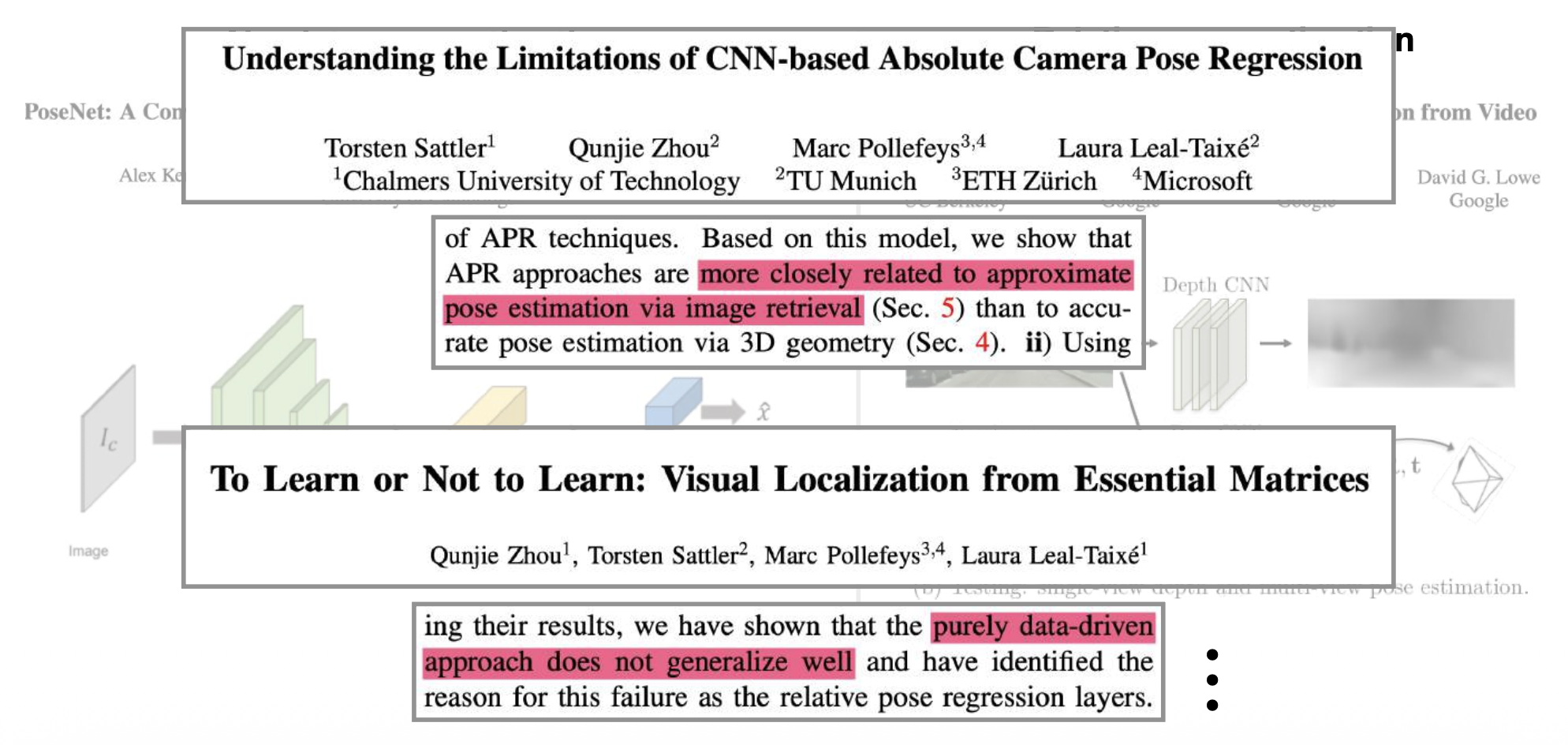
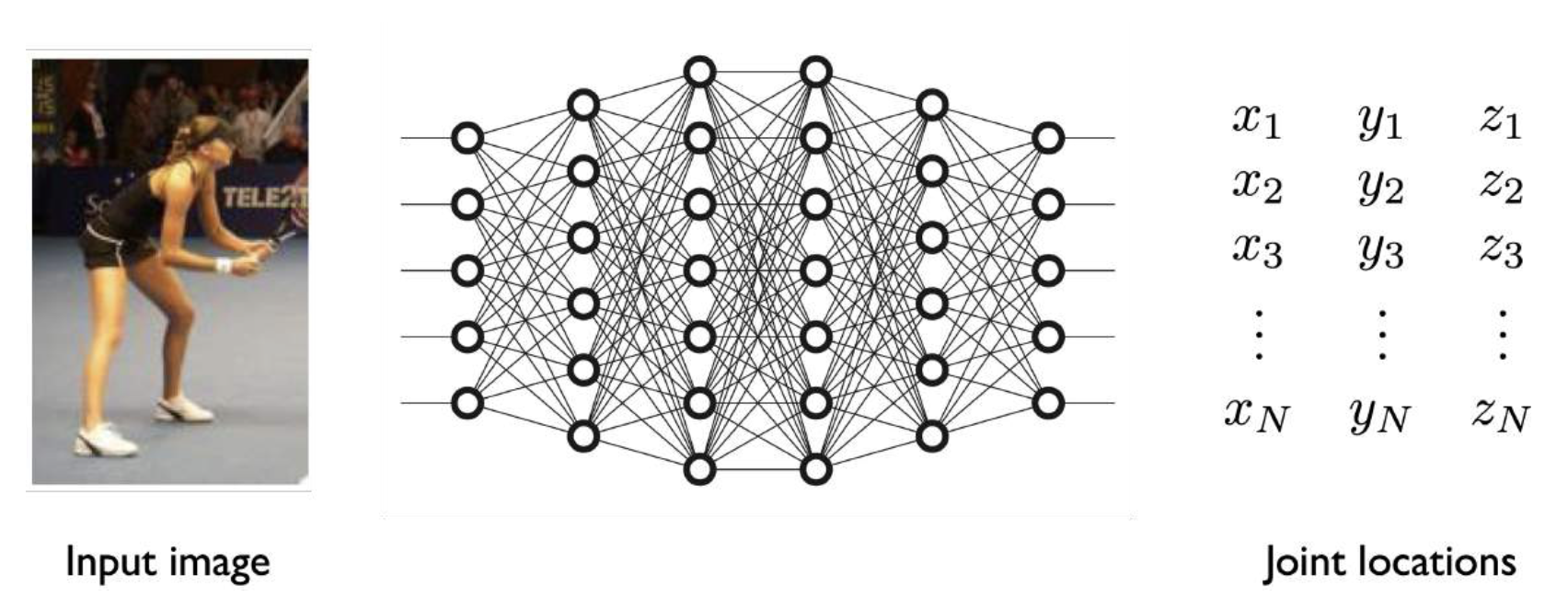
使用网络直接从图像预测姿态?
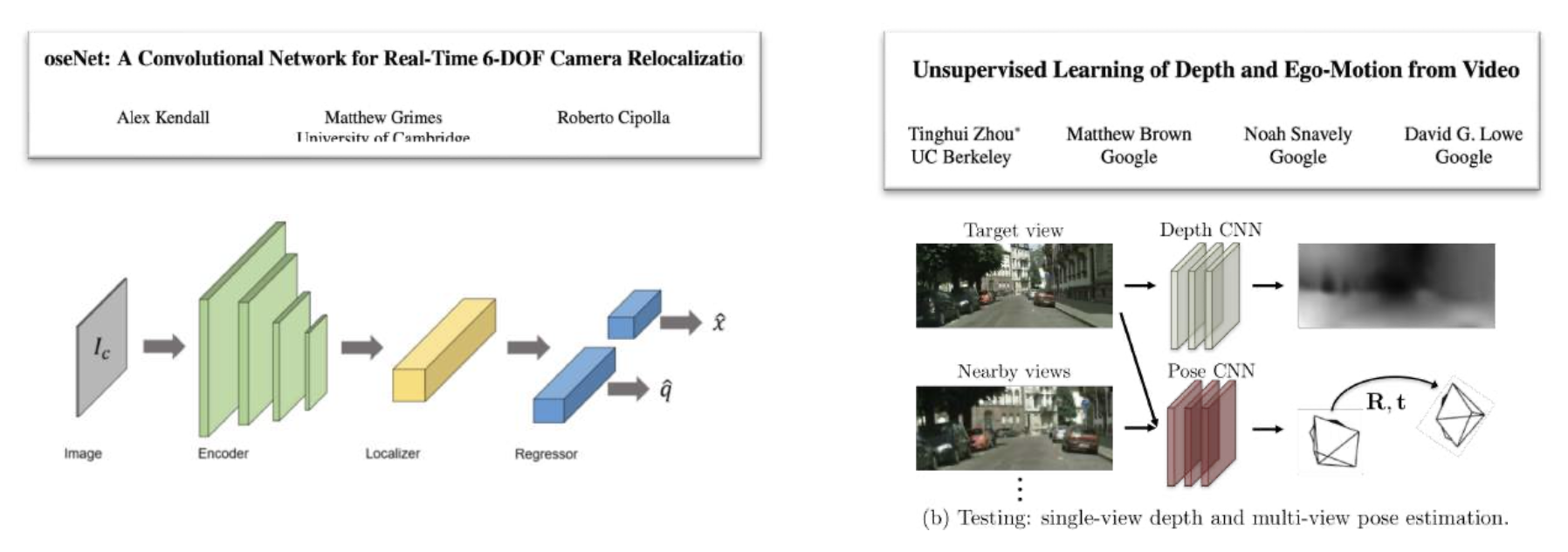
但效果不佳!
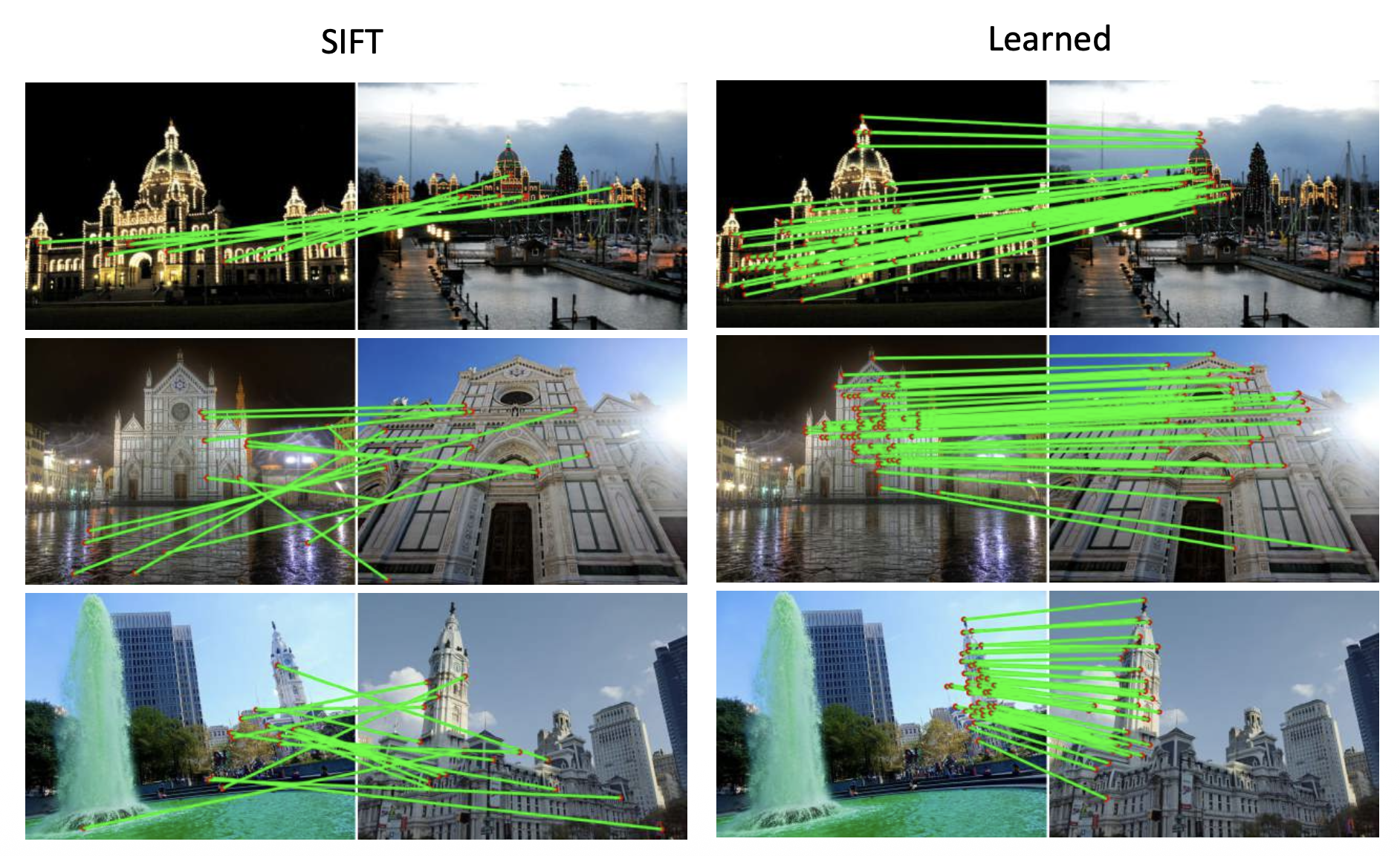
使用深度学习来提升特征匹配:
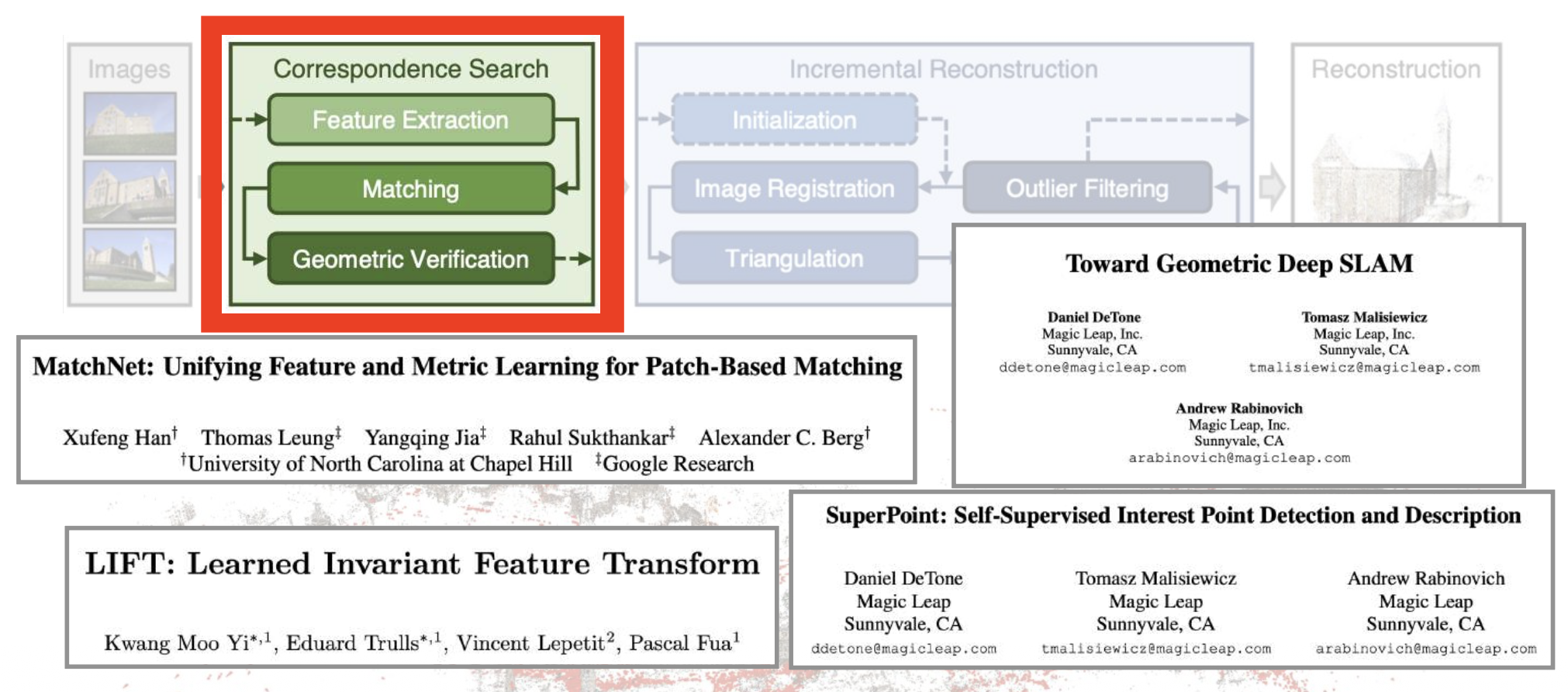
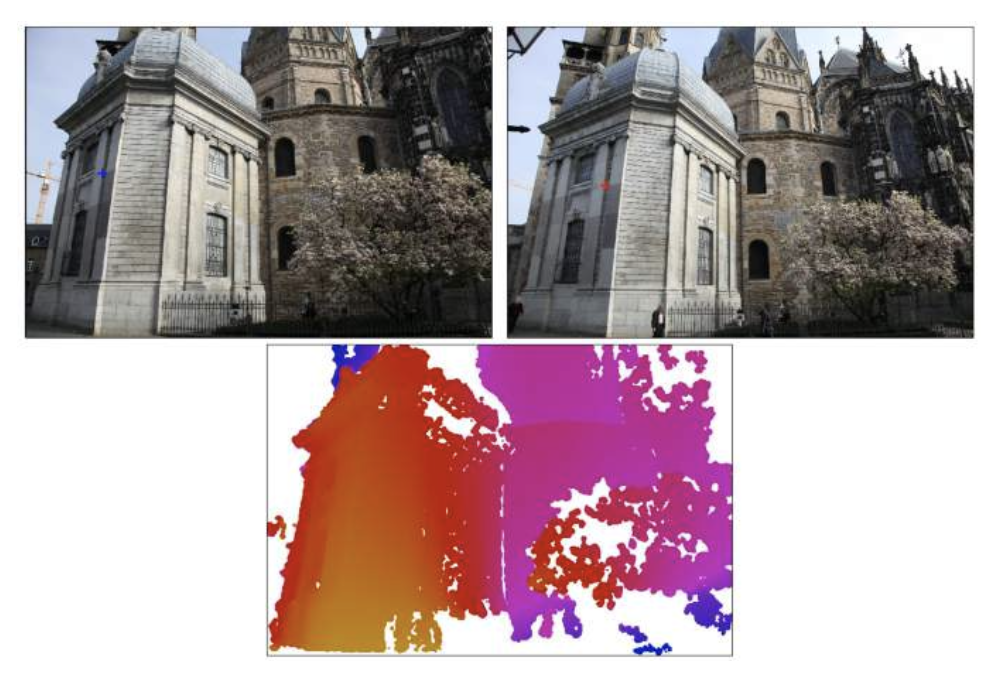
为什么使用深度学习?
- 传统的特征检测器和描述器是手工制作的(比如 DoG, SIFT, ORB...)
- 局限:
- 仅考虑几何,不涉及语义
- 无法处理纹理较差的情况
- 对以下改变不够鲁棒
- 视点 (viewpoint) 变化
- 光照 (illumination) 变化
- 运动模糊 (motion blur)
- ...
例子
Training Detector⚓︎
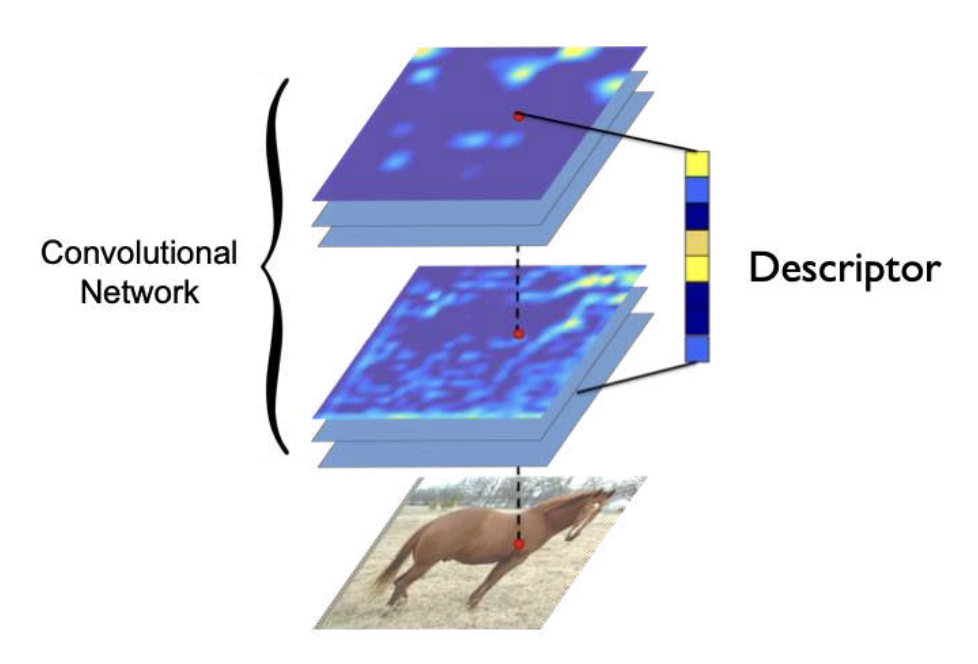
用热图(heatmap) 表示特征点的位置
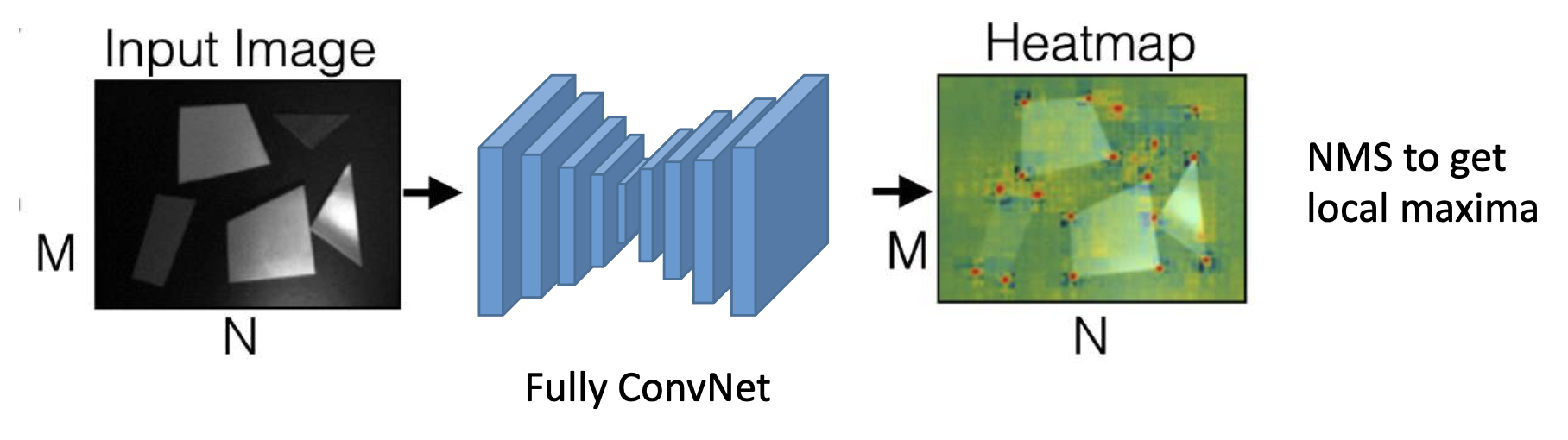
训练能够检测角的 CNN:
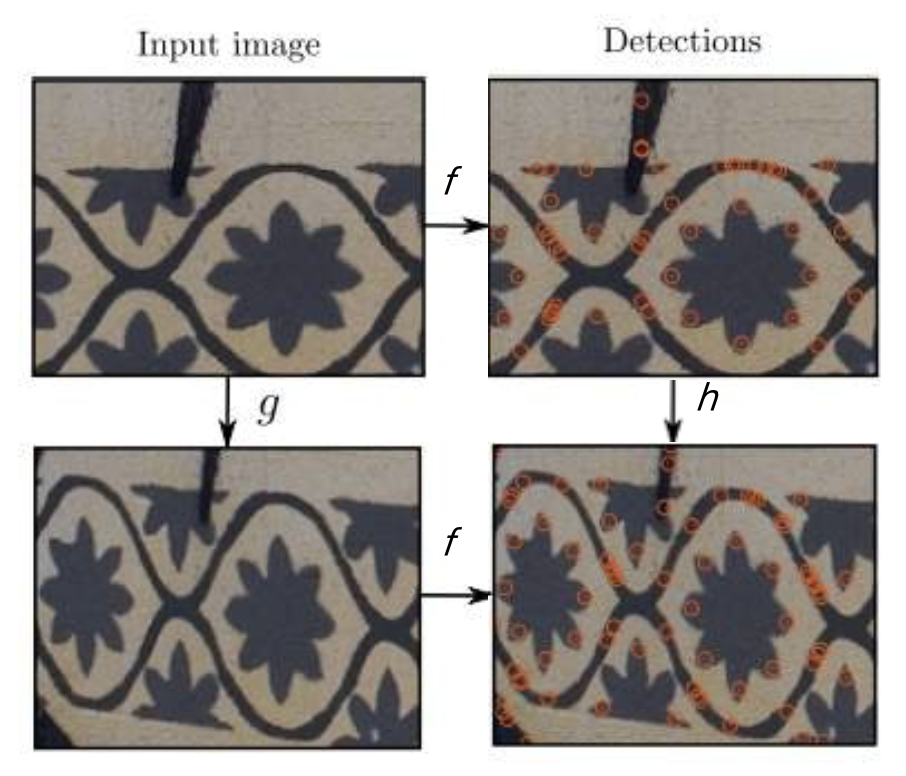
训练 CNN 以强制可重复性(repeatability):
- 扭曲(warp) 图像
-
强制等变性(equivariance)
\[ \min_{f} \frac{1}{n} \sum_{i=1}^{n} \|f(g(I)) - g(f(I))\|^2 \]
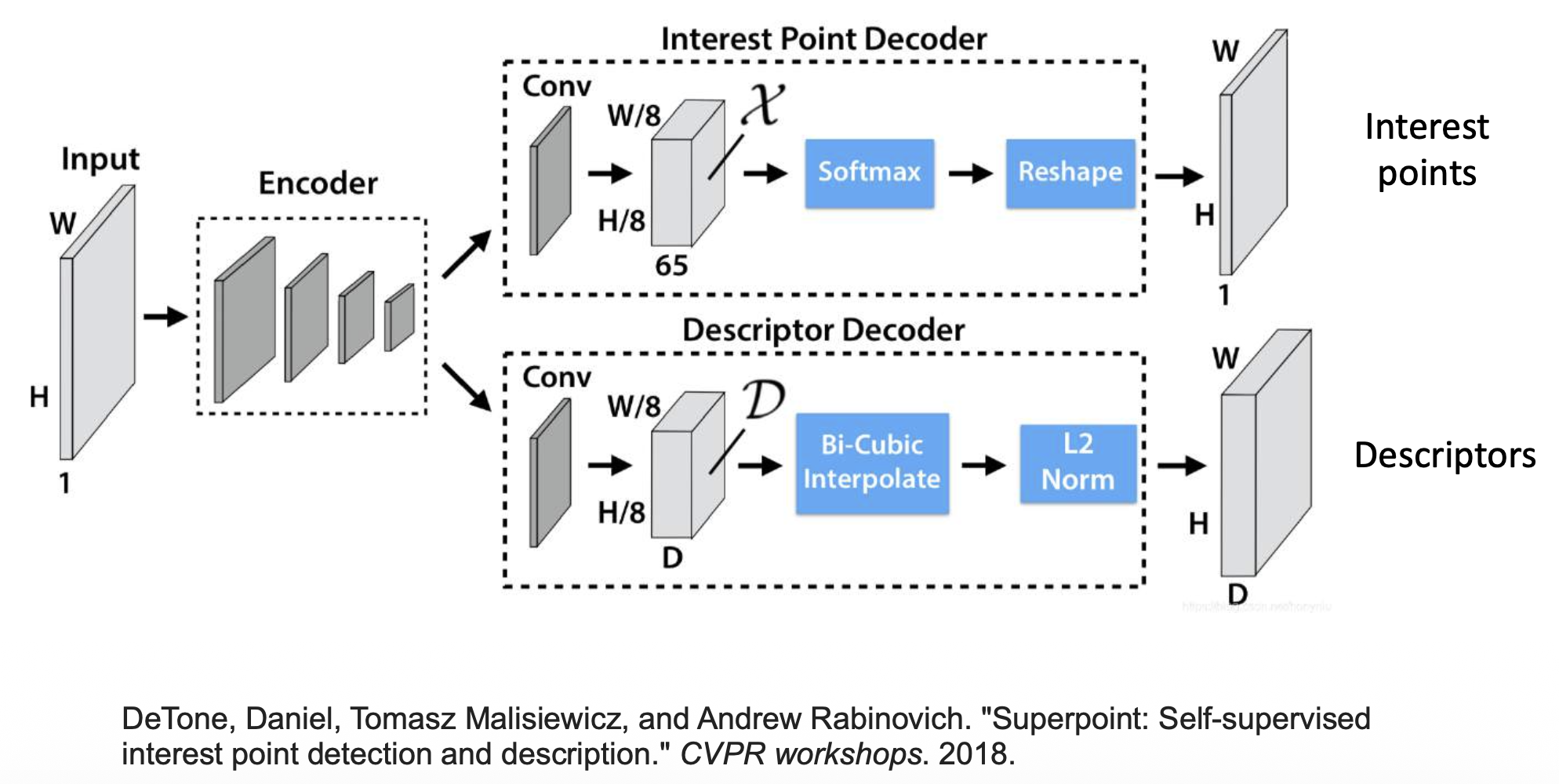
Training Descriptor⚓︎
从 CNN 特征图中提取描述器:
通过度量学习(metric learning) 训练描述器:
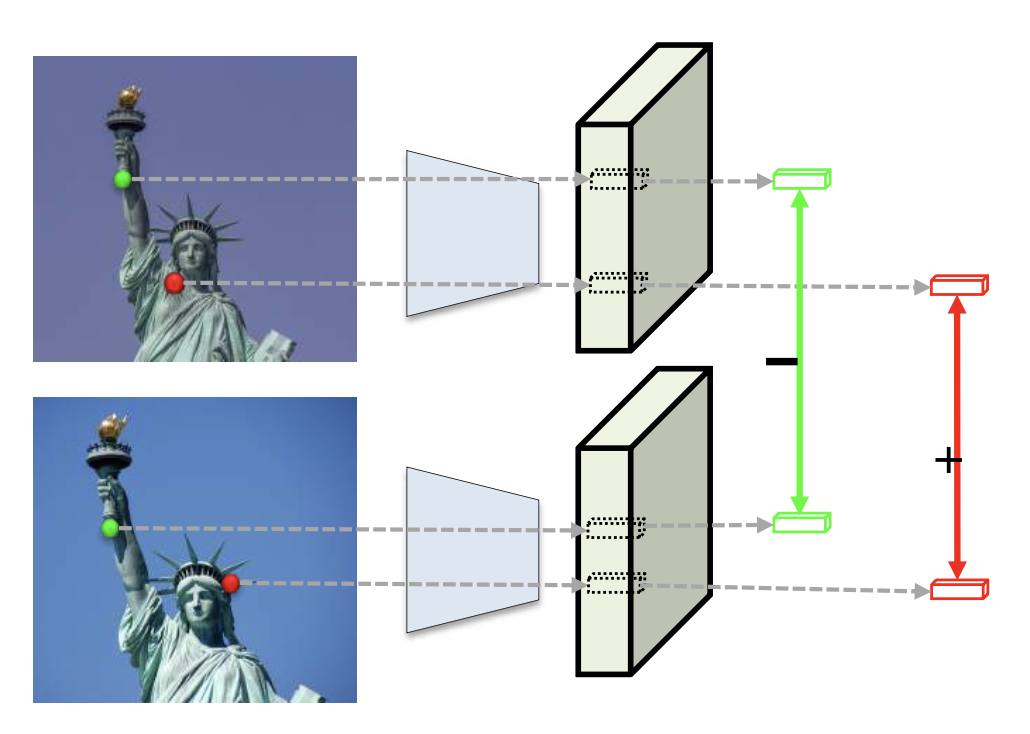
对比损失 (contrastive loss):
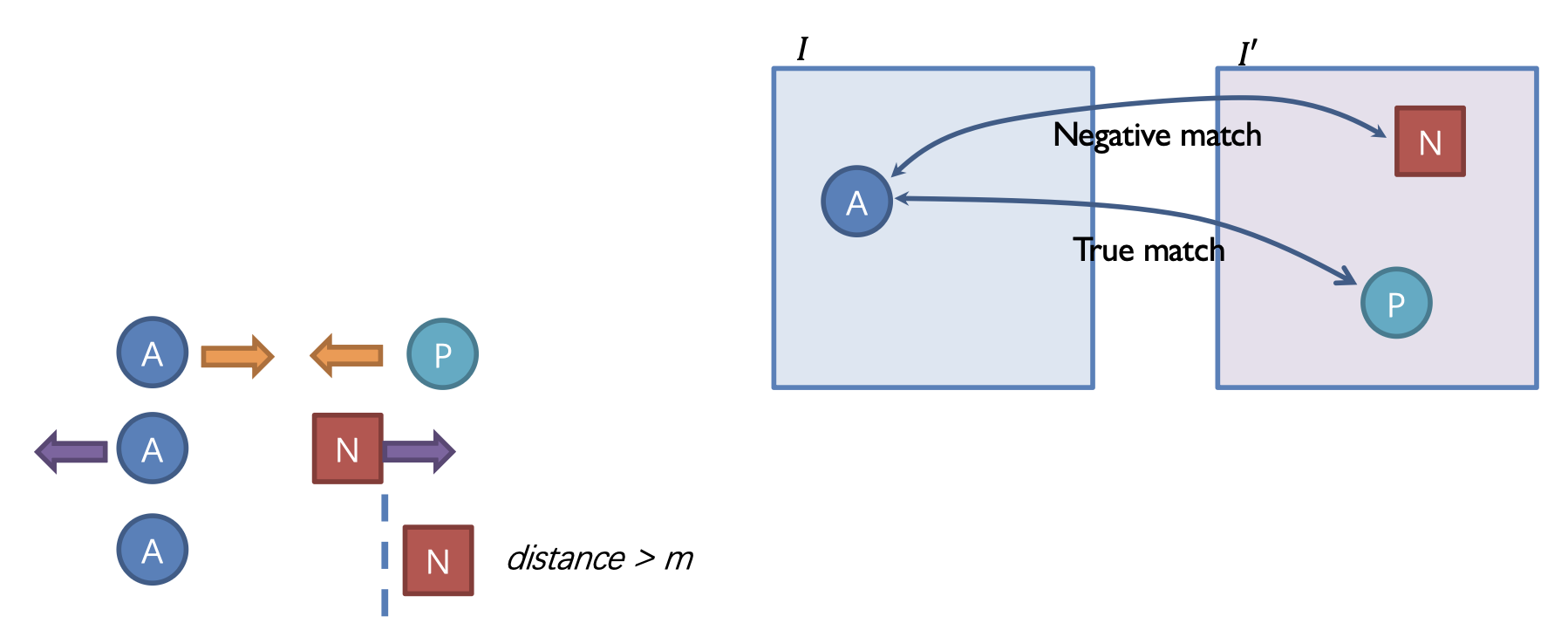
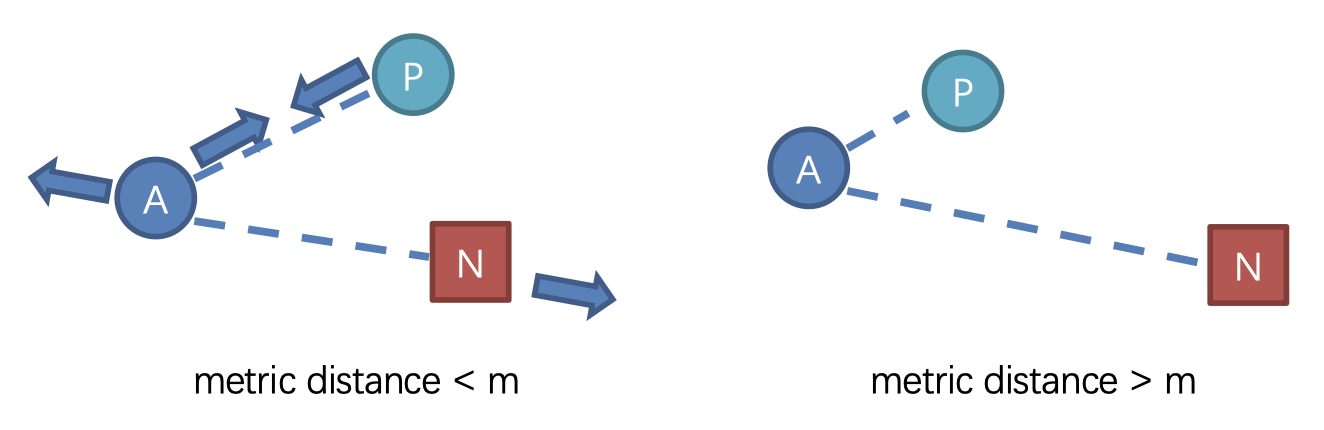
三元组损失 (triplet loss):
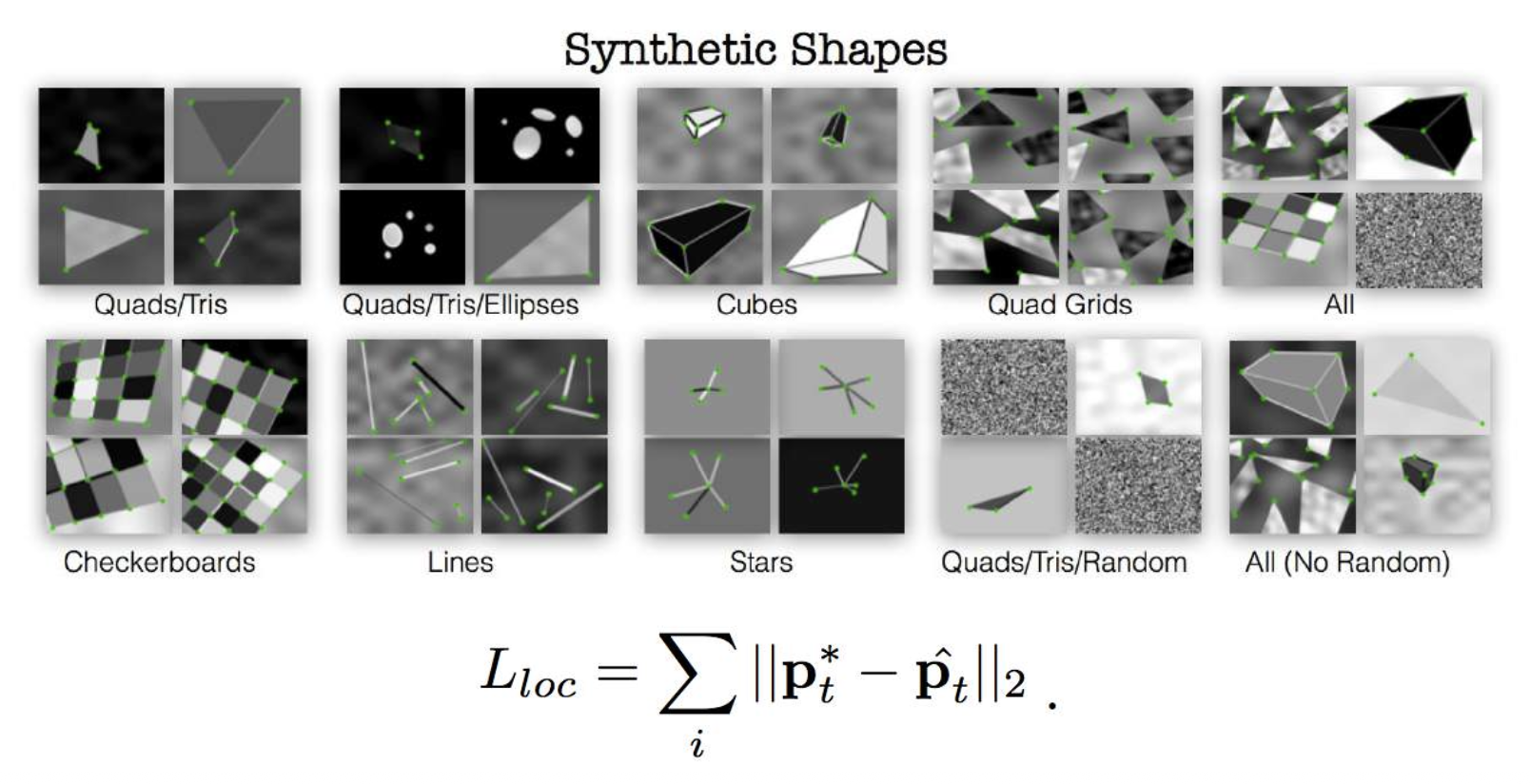
训练数据的来源:
-
合成数据
-
使用 MVS(多视图立体)
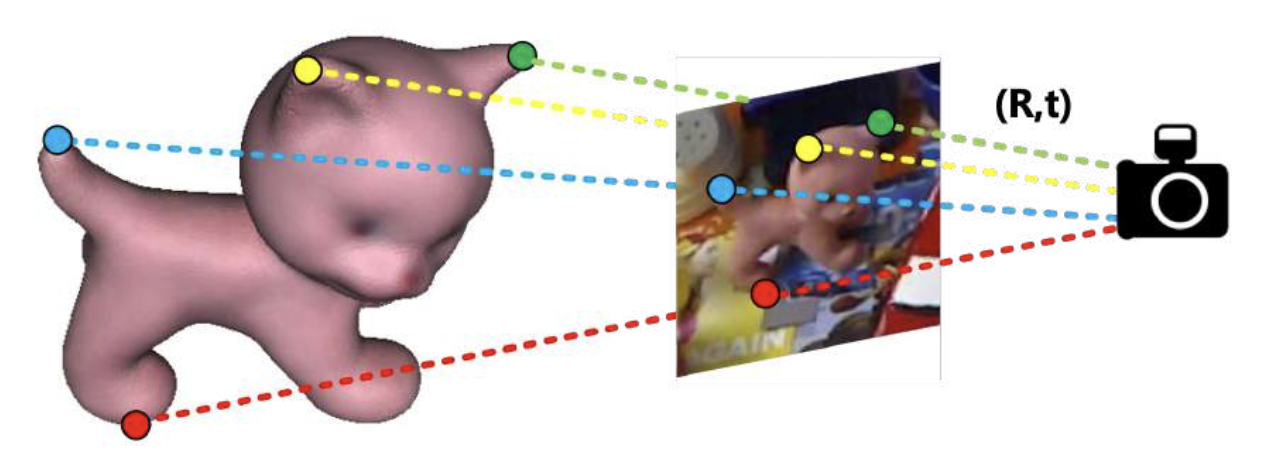
Object Pose Estimation⚓︎
目标姿态估计(object pose estimation) 是指估计物体相对于相机坐标系的三维位置和方向。
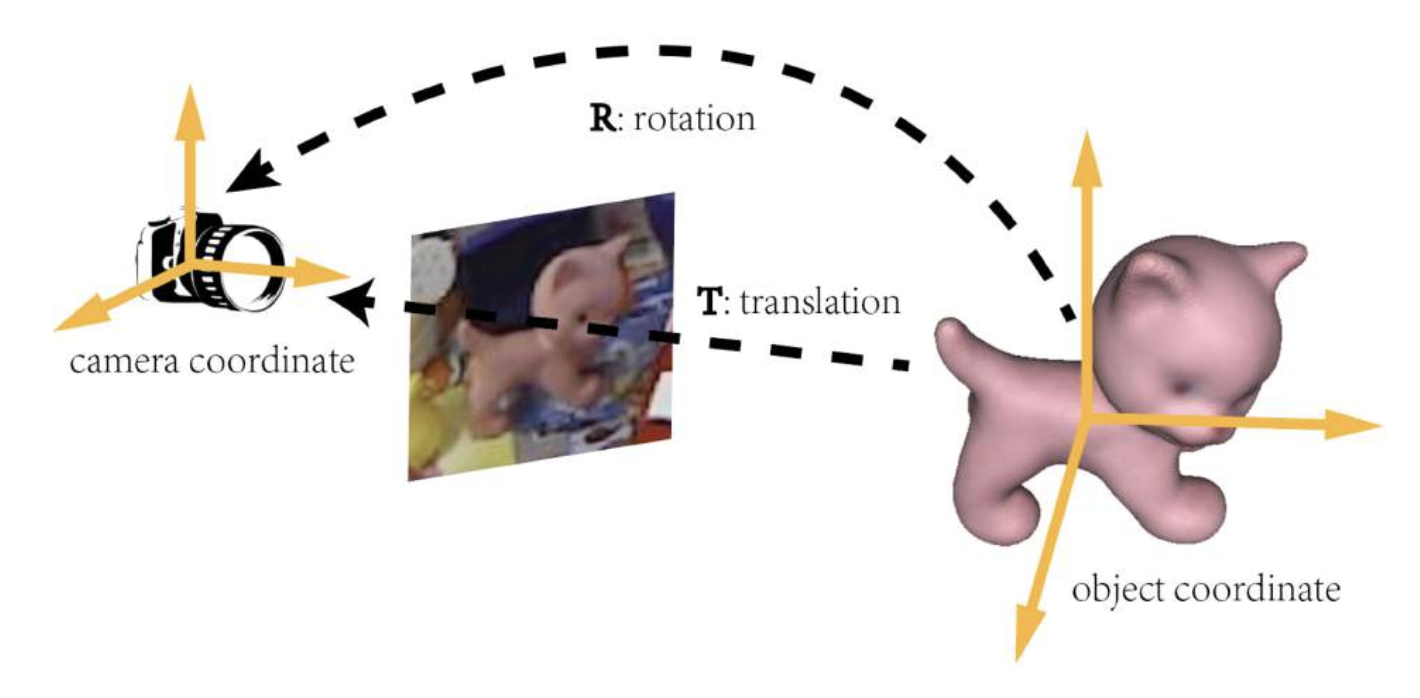
应用
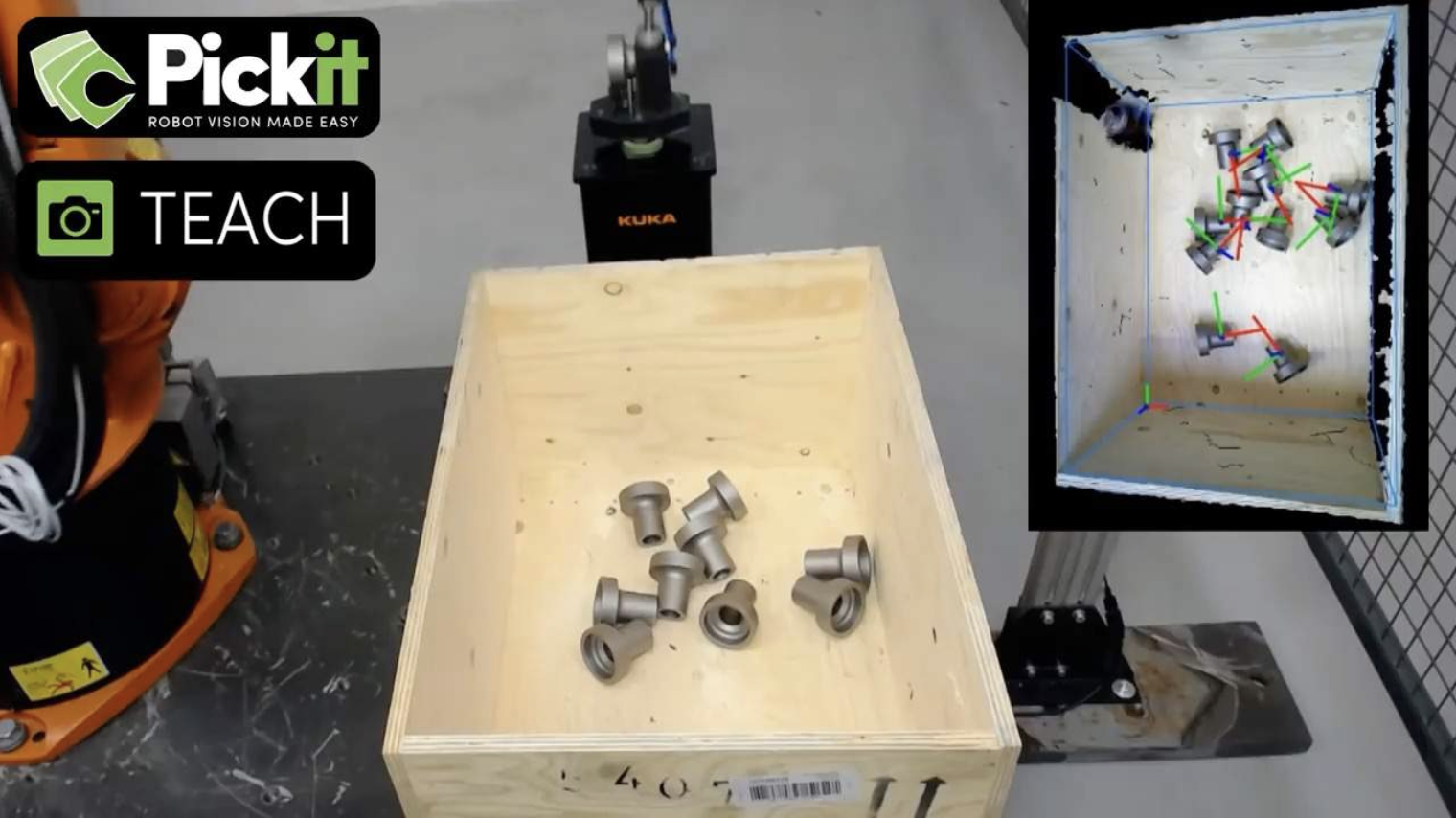

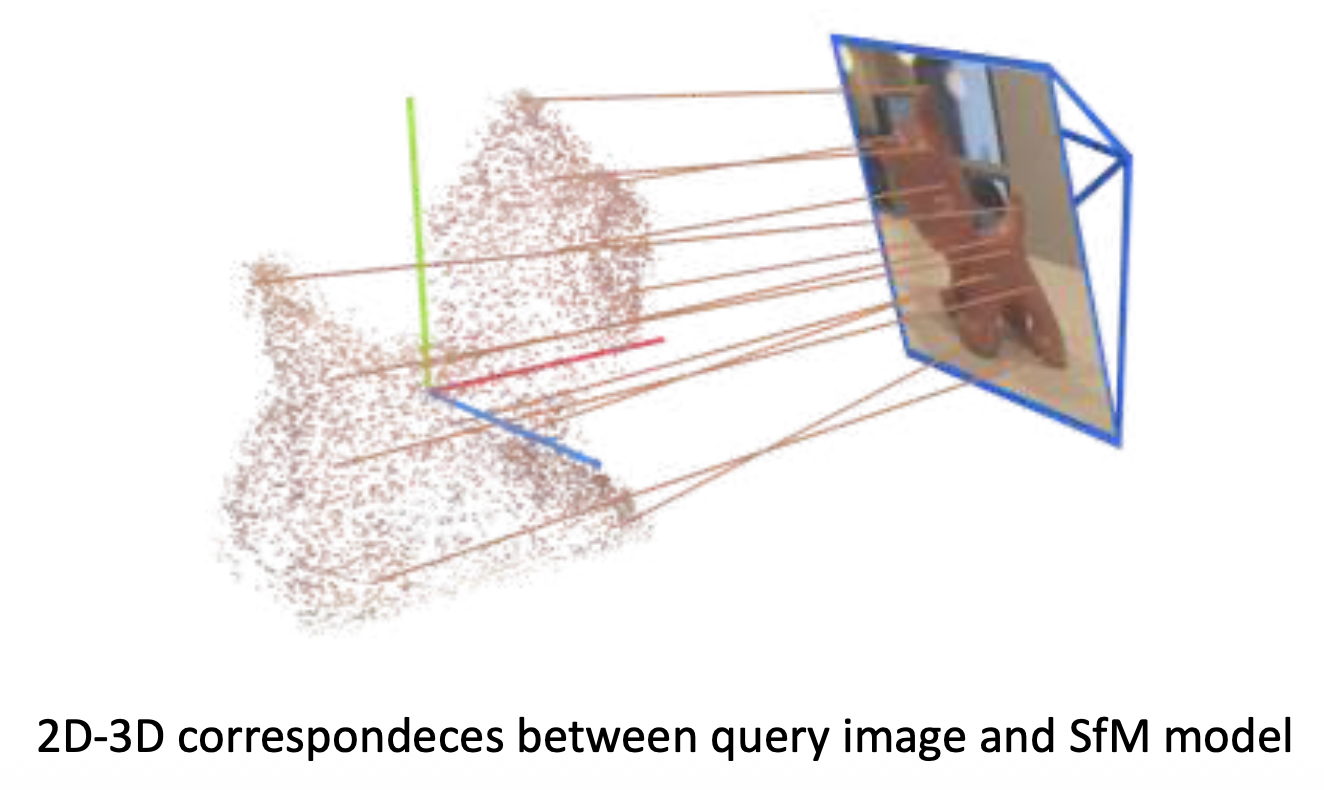
类似视觉定位:
- 寻找 3D-2D 对应关系
- 通过透视 n 点(PnP)算法求解 R 和 t
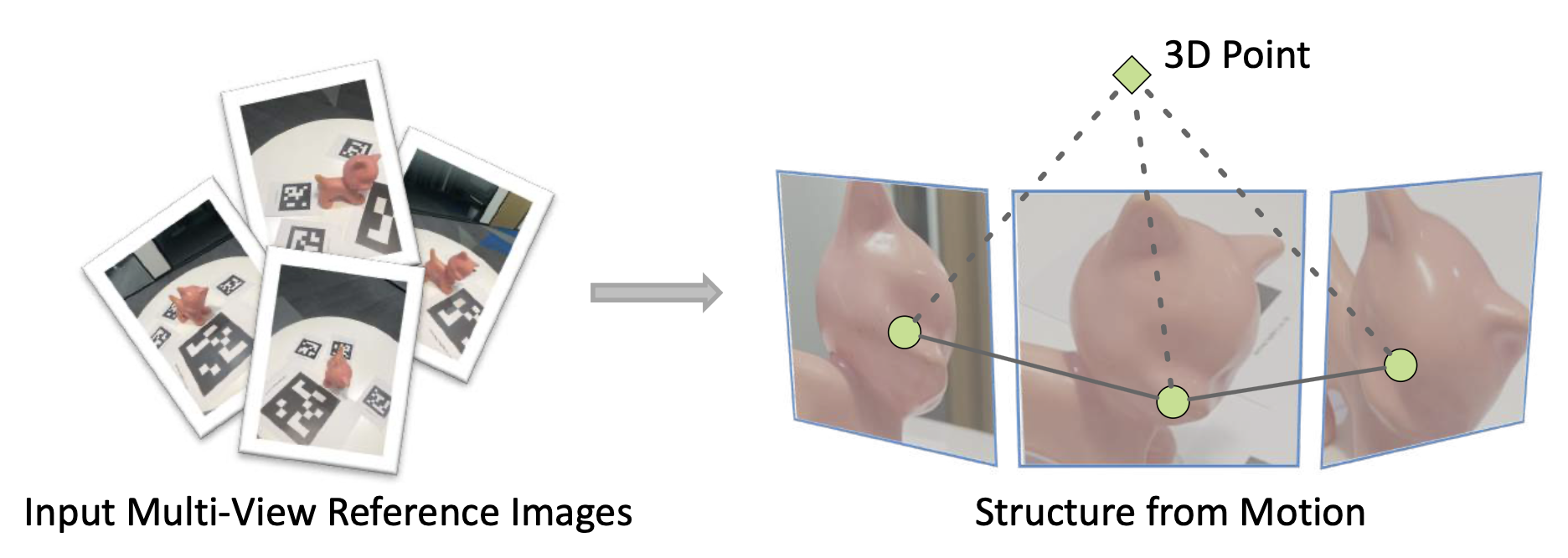
对于第一步,我们有以下方法:
-
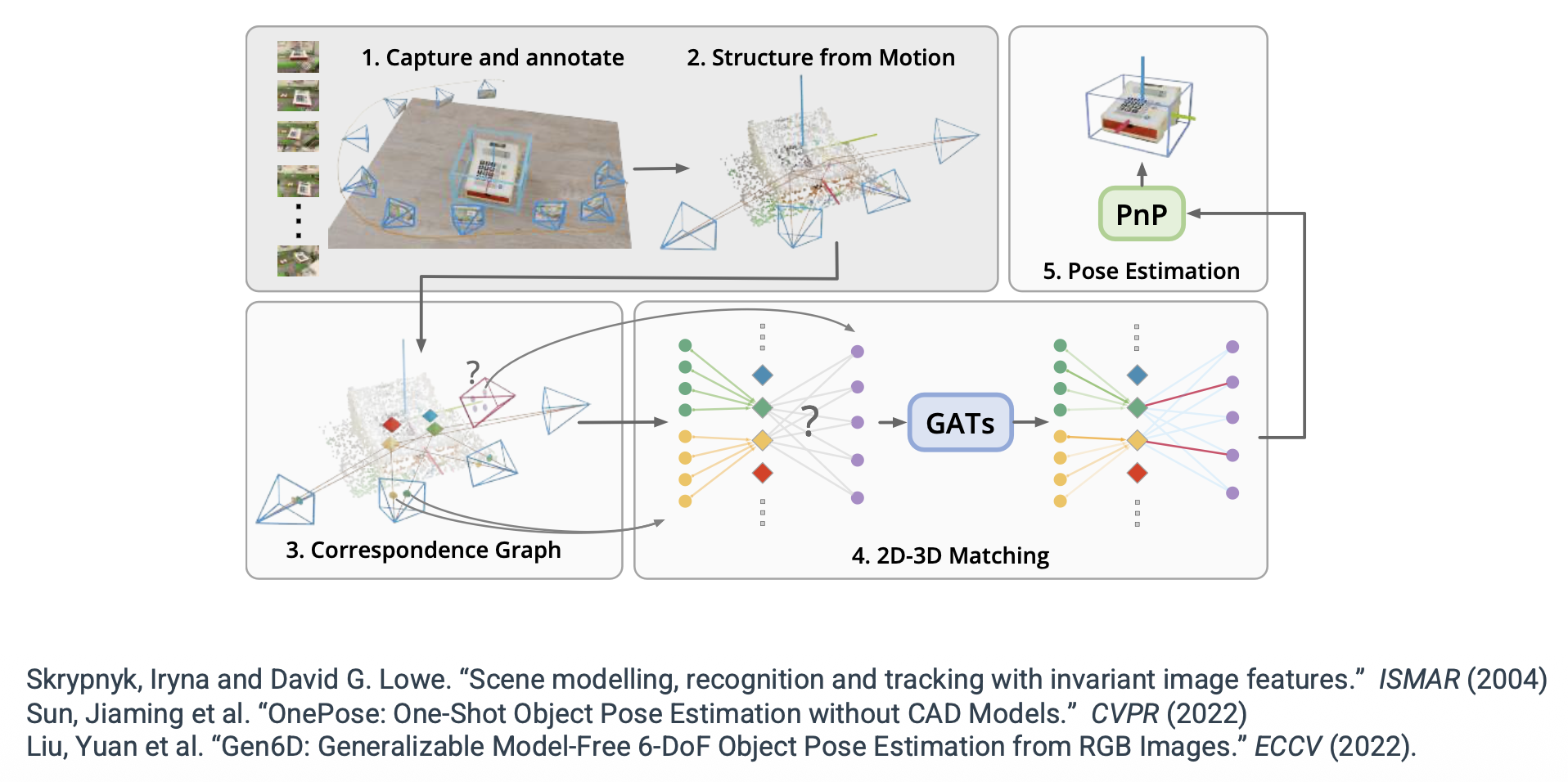
基于特征匹配的方法
-
根据输入多视图图像来重新构造目标 SfM 模型
-
然后通过提升 2D-2D 匹配到 3D 来获得 2D-3D 对应关系
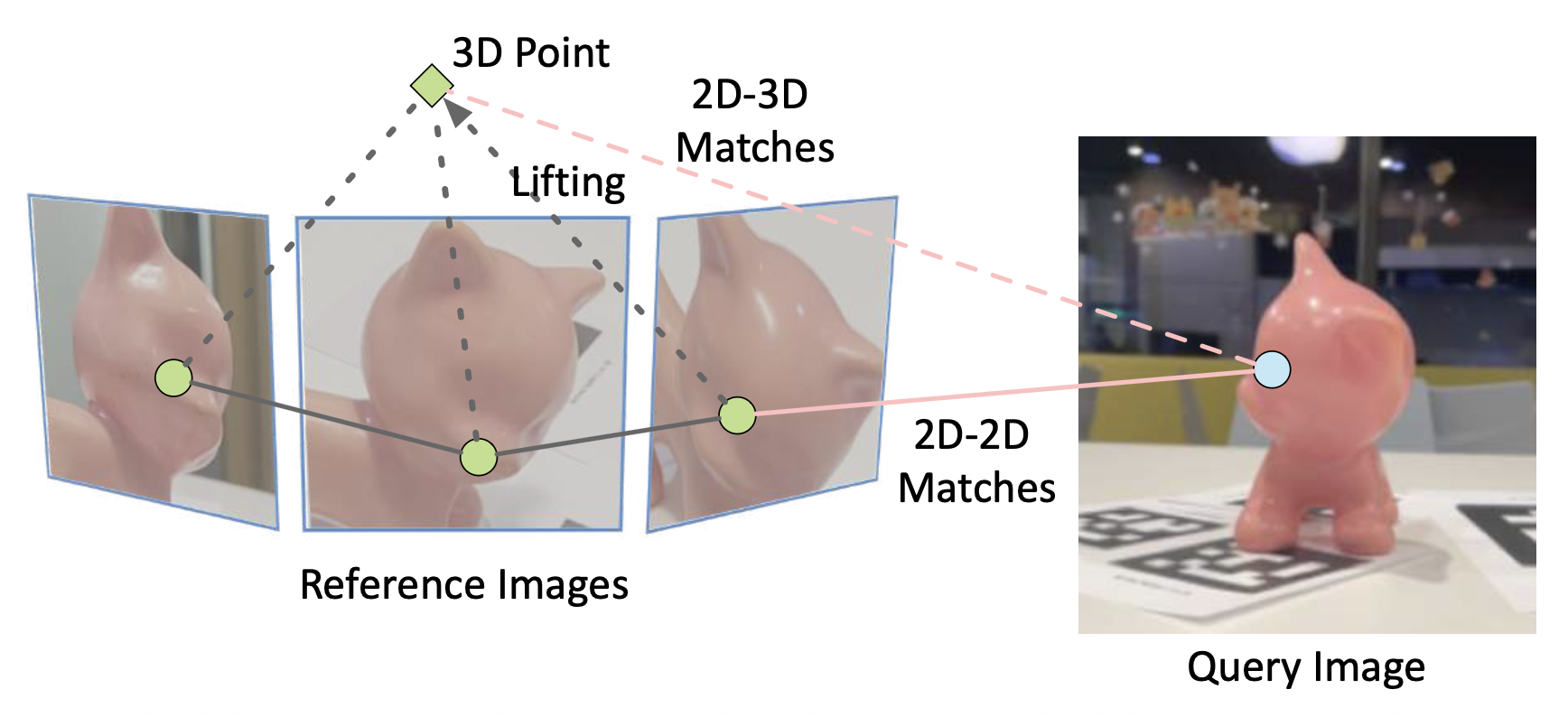
-
通过 PnP 求解查询图像的目标姿态
延伸阅读
-
-
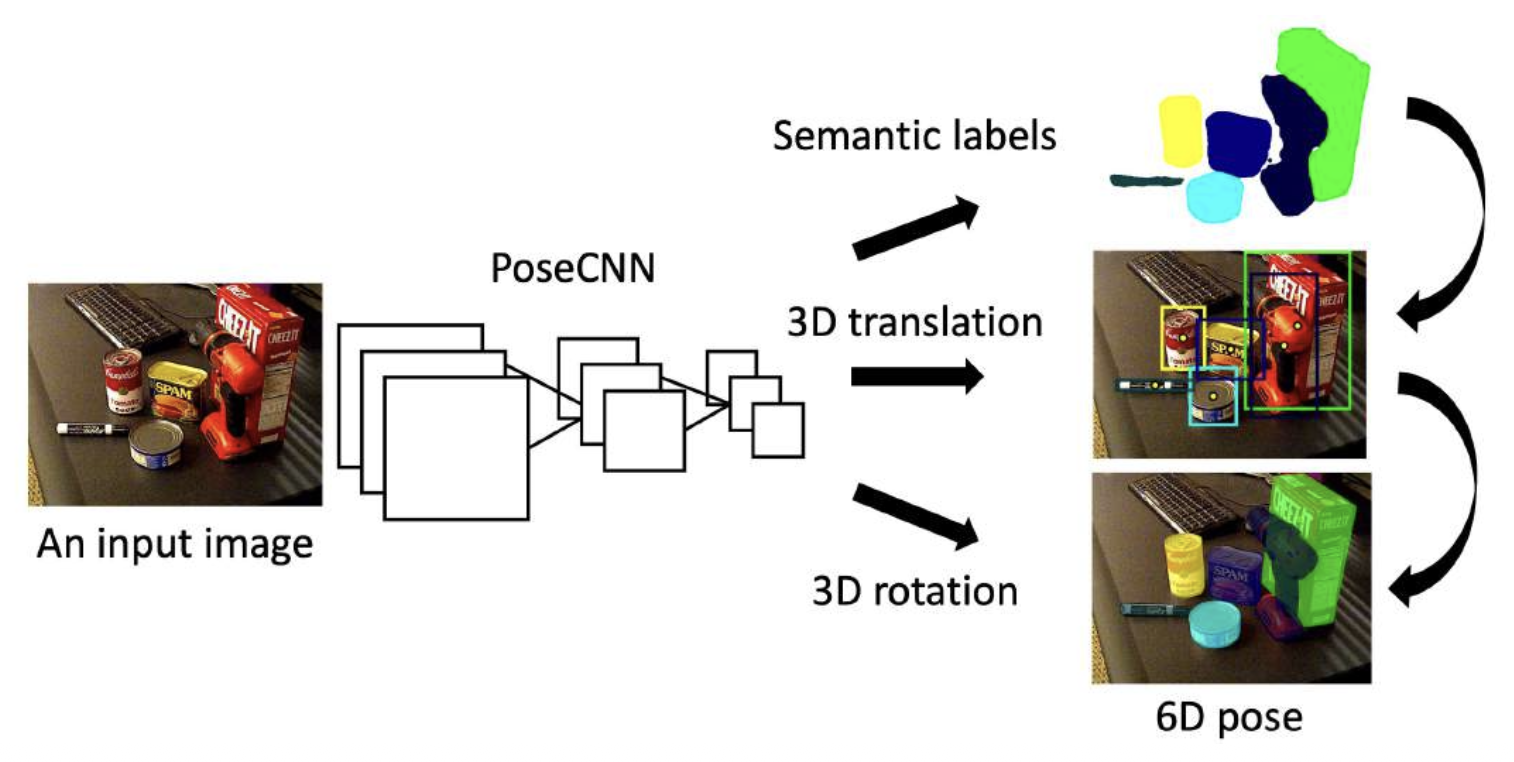
直接姿态回归方法(direct pose regression methods)
- 直接使用神经网络回归查询图像的对象姿态
- 需要渲染大量图像进行训练
-
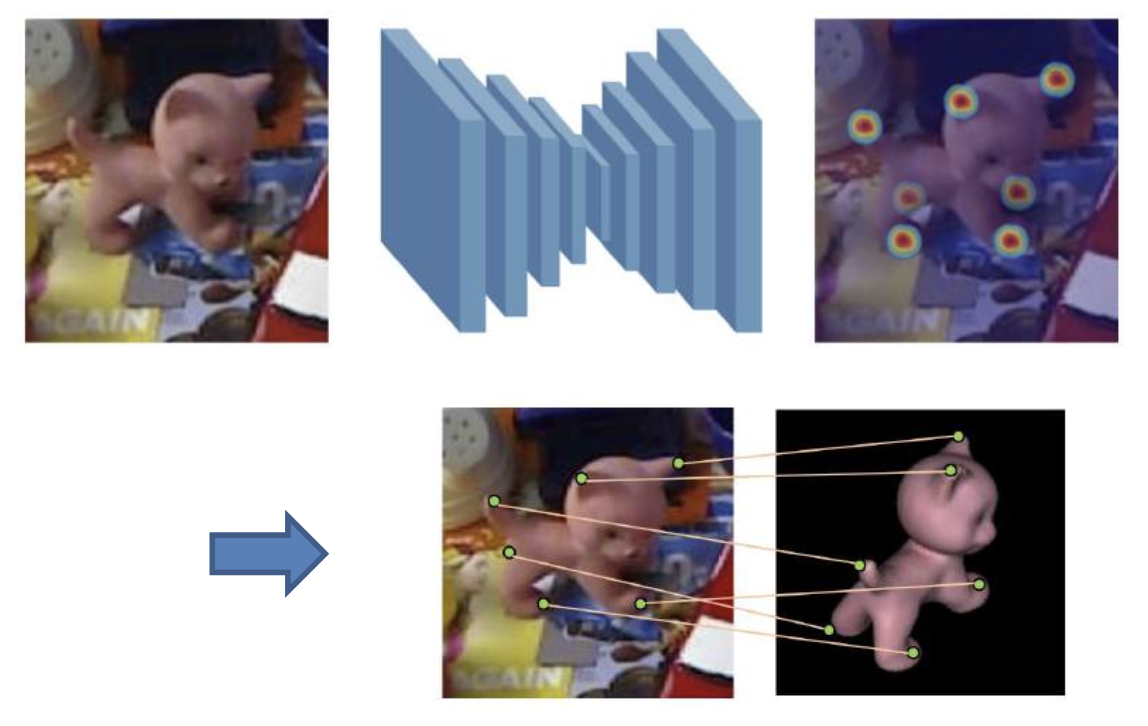
关键点检测方法(keypoint detection methods):
- 使用 CNN 检测预定义的关键点
- 需要渲染大量图像进行训练
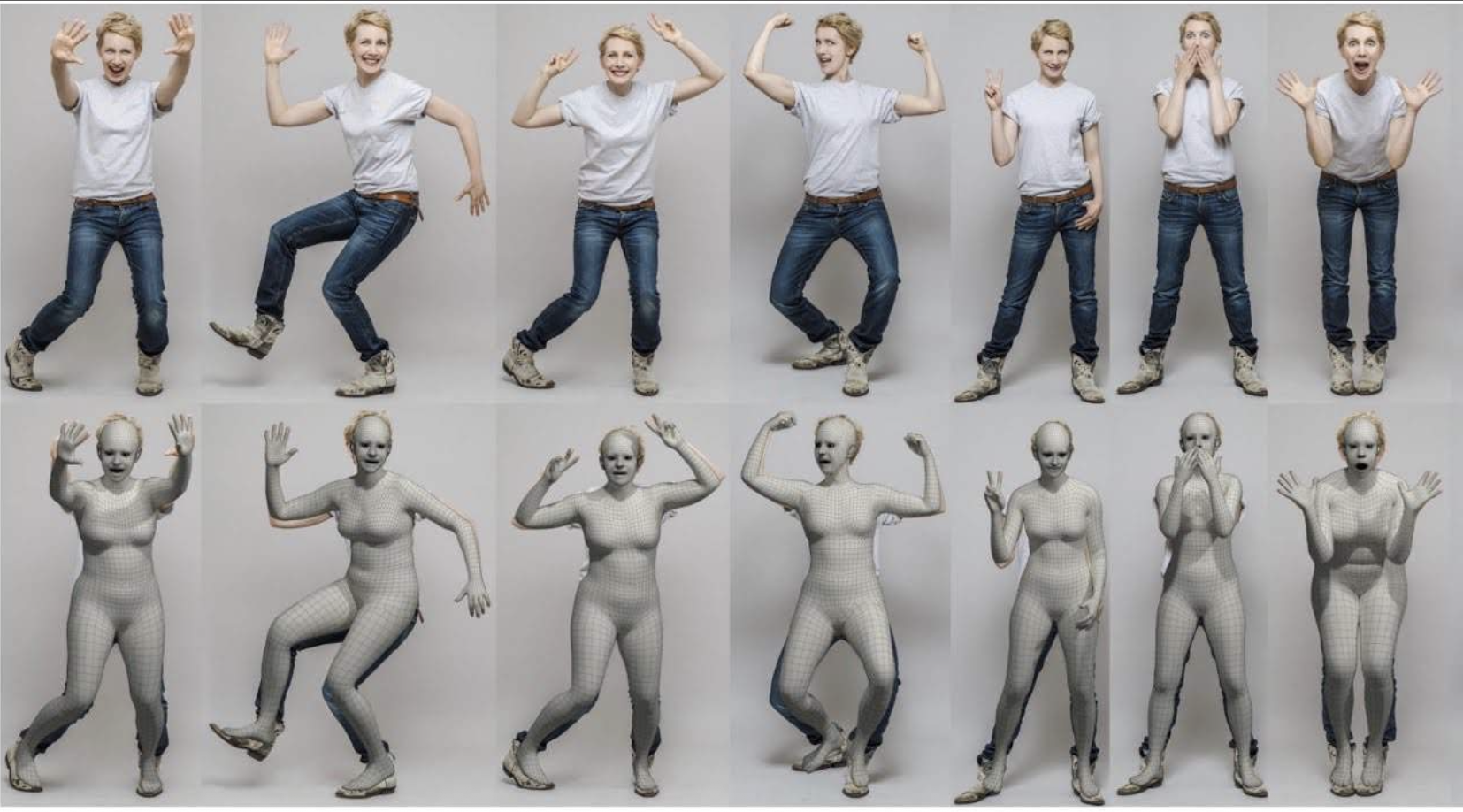
Human Pose Estimation⚓︎
- 2D 人类姿态估计:在图像中定位人体关节(关键点包括肘部、腕部等)
-
3D 人类姿态估计:估算每个关节的 3D (x, y, z) 坐标
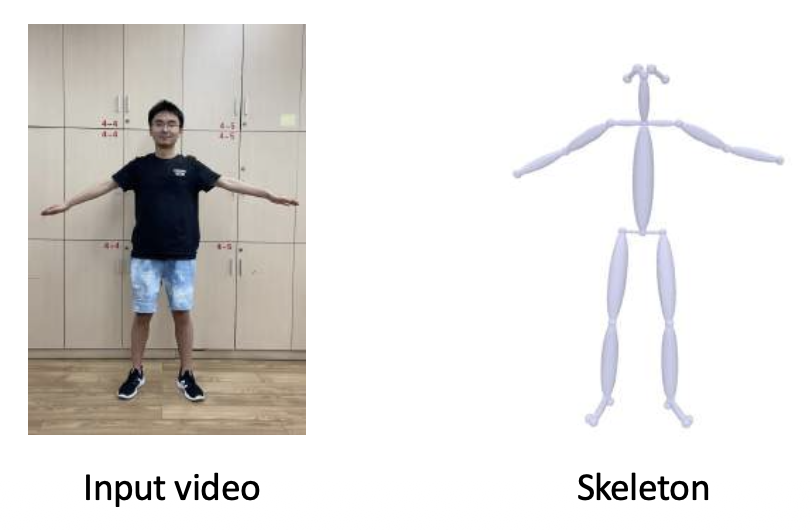
例子

方法:
-
基于标记 (marker) 的 MoCap 系统
- MoCap:光学动作捕捉 (optical motion capture)

-
无标记 MoCap:多视图 3D 人类姿态估计
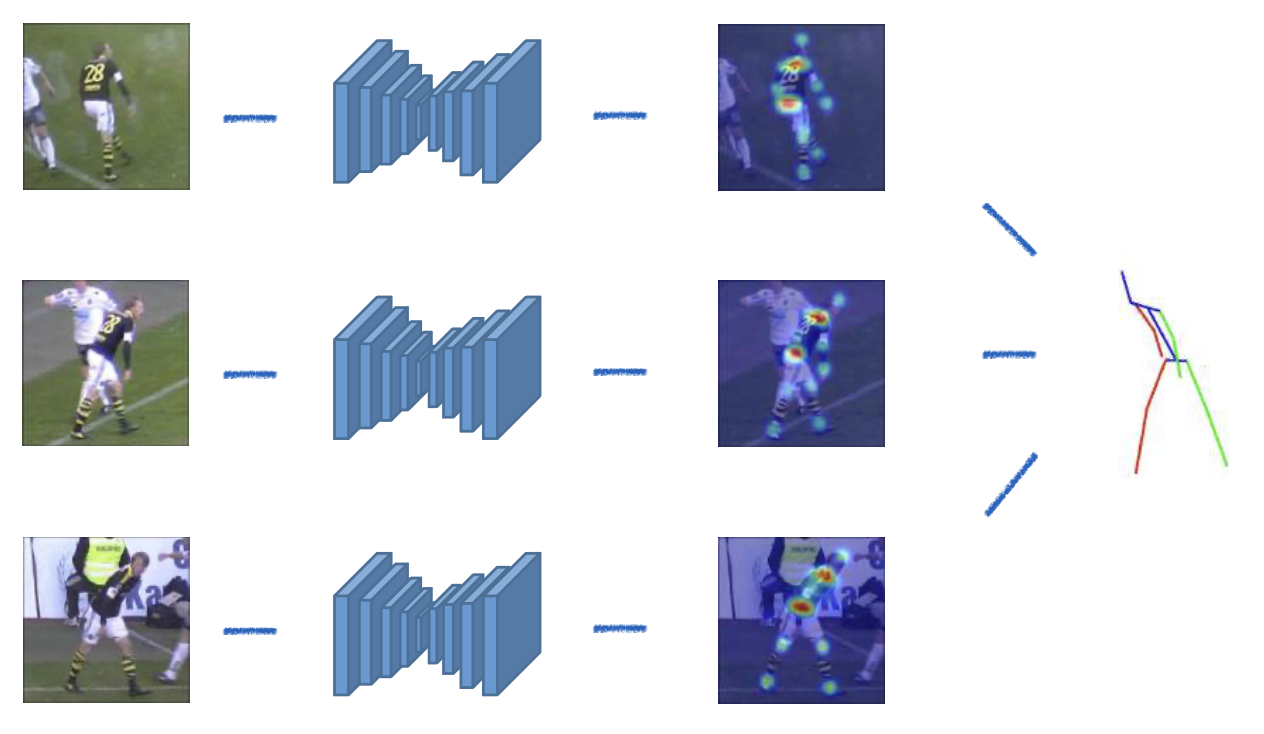

-
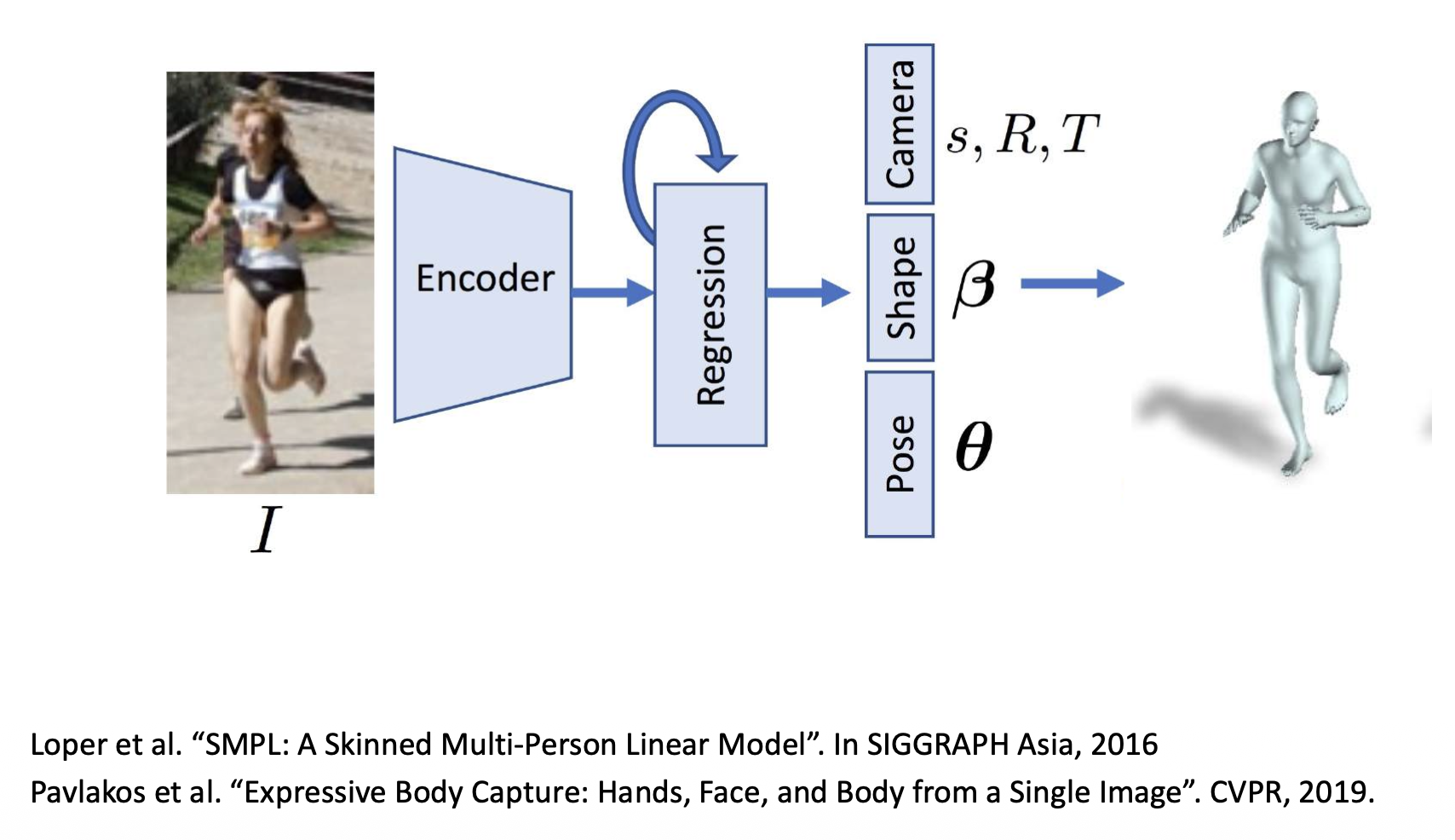
单目 (monocular) 3D 人体姿态估计
-
使用单个相机来估计 3D 人体姿态
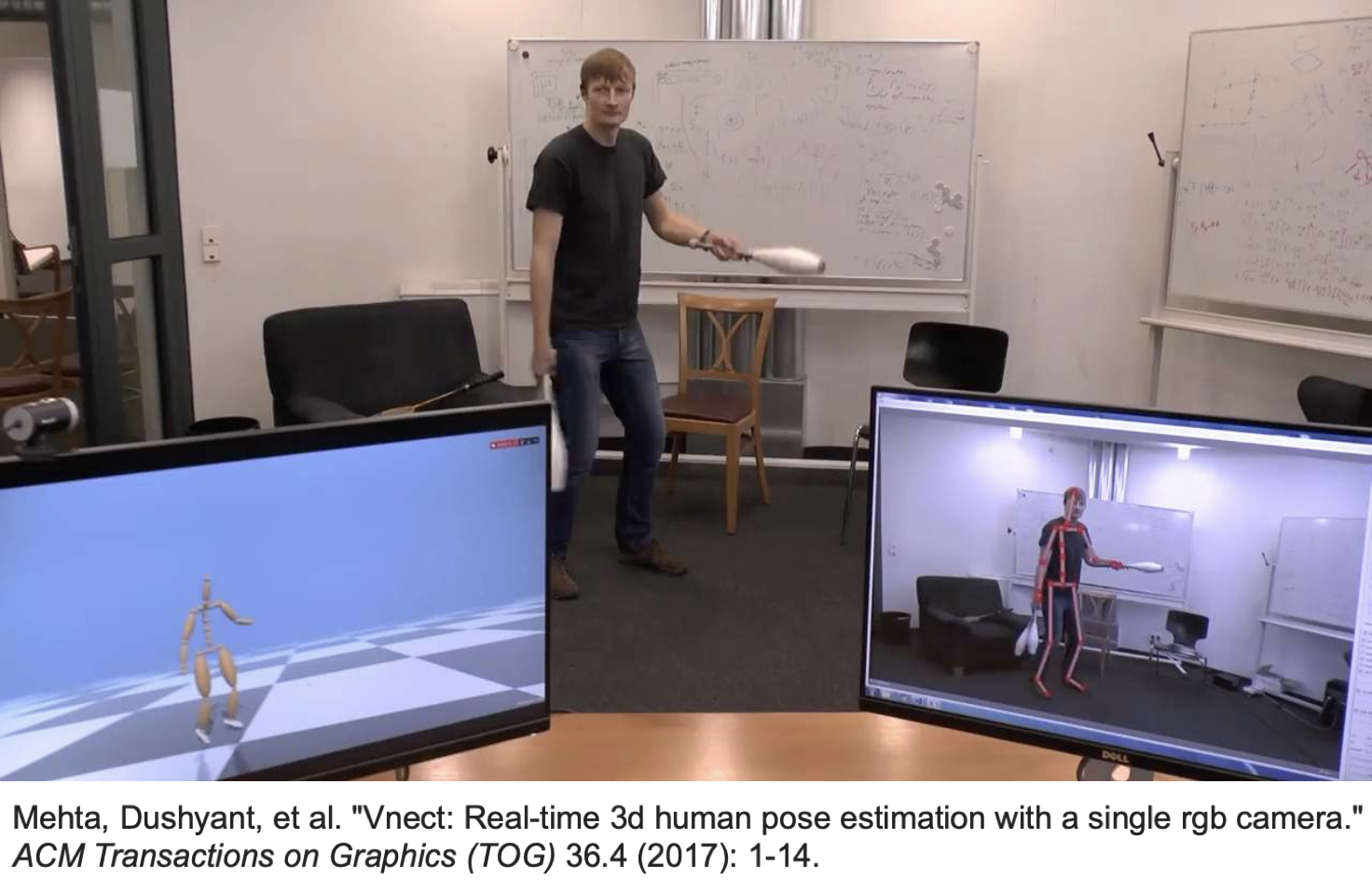
-
使用单张 RGB 图像来估计 3D 人体姿态

-
Dense Reconstruction⚓︎
稠密重构(dense reconstruction) 的传统管线:
- 每张图像计算深度图(多视图立体)
- 将深度图融合成 3D 表面(泊松重建)
- 纹理映射
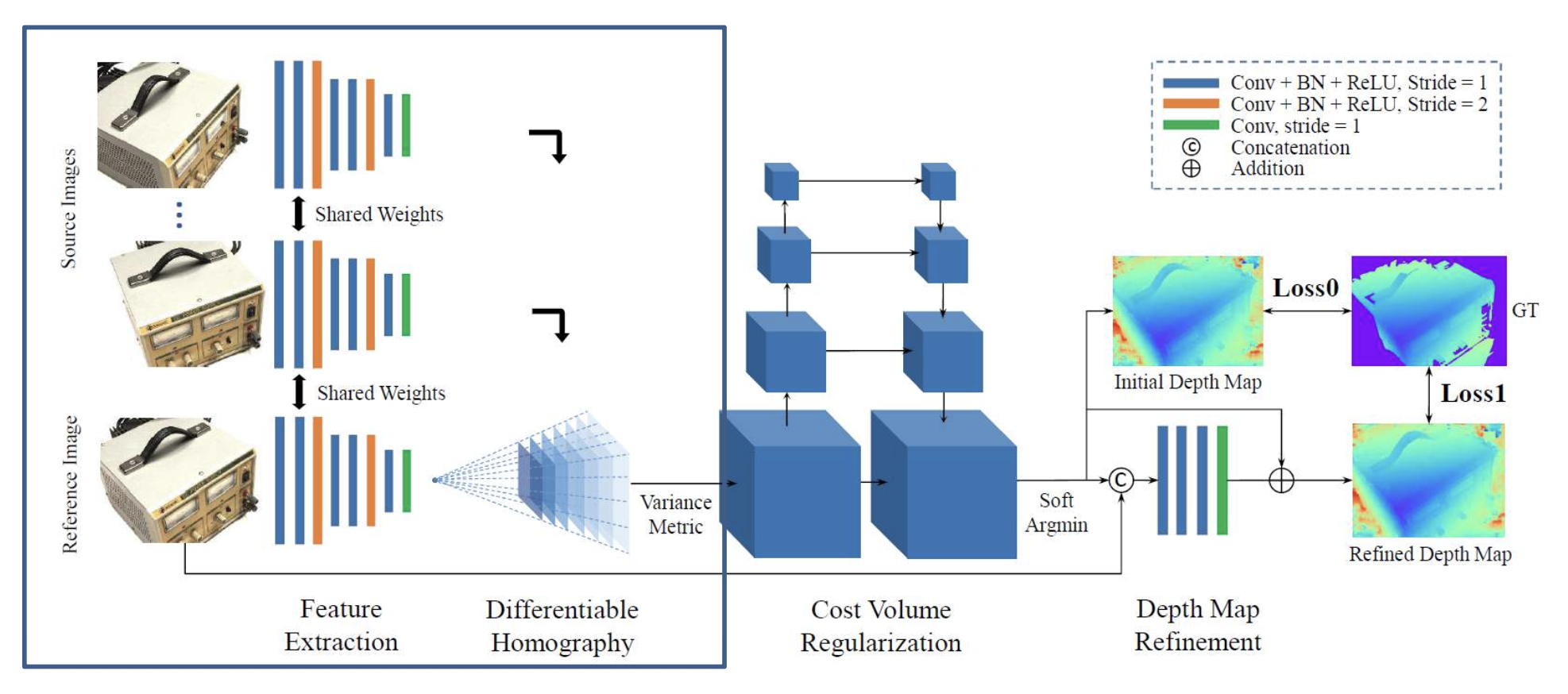
回顾:多视图立体(MVS)
计算参考图像中每个点的每个深度值的误差。
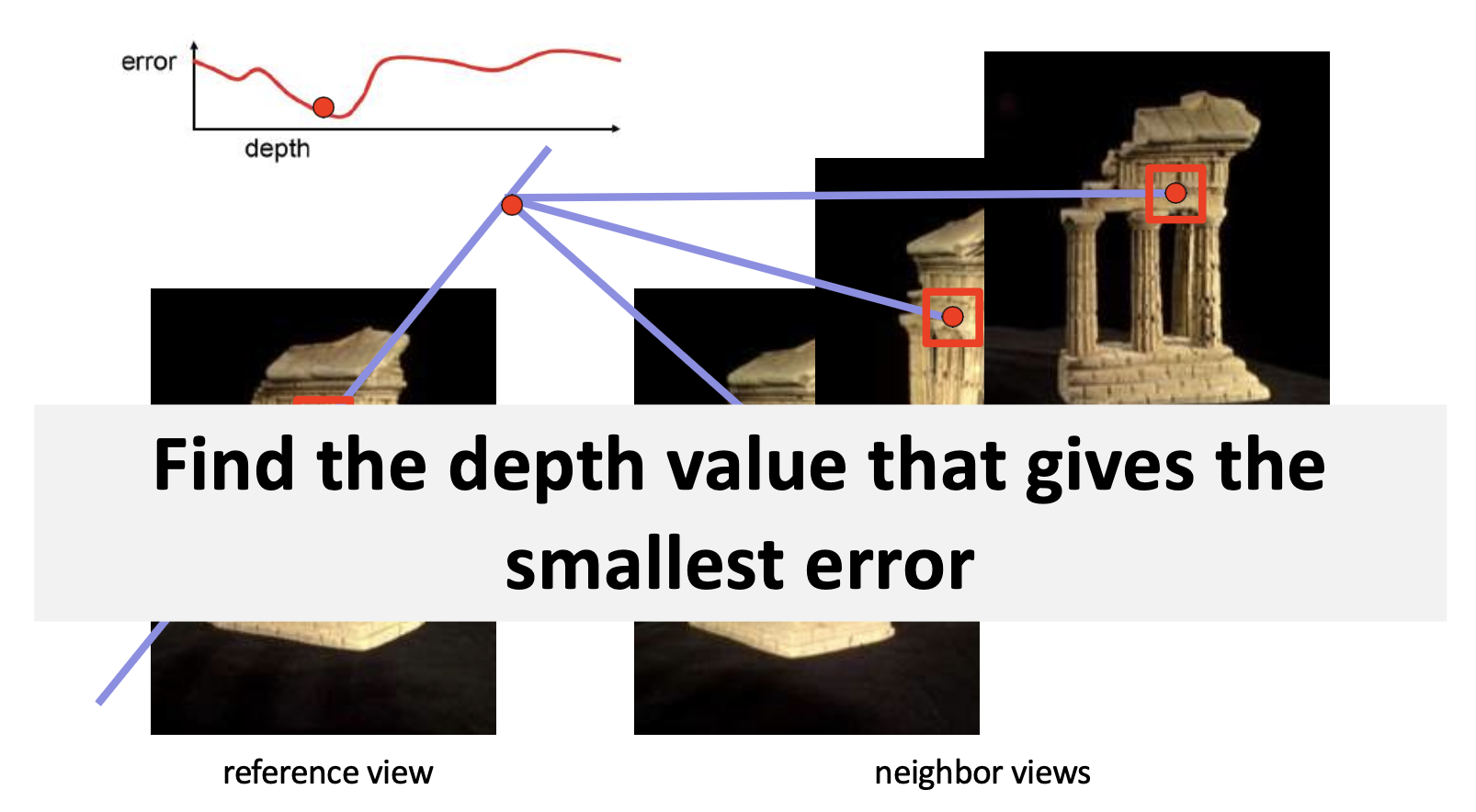
成本体积是一个存储了所有深度下所有像素的误差的三维数组。
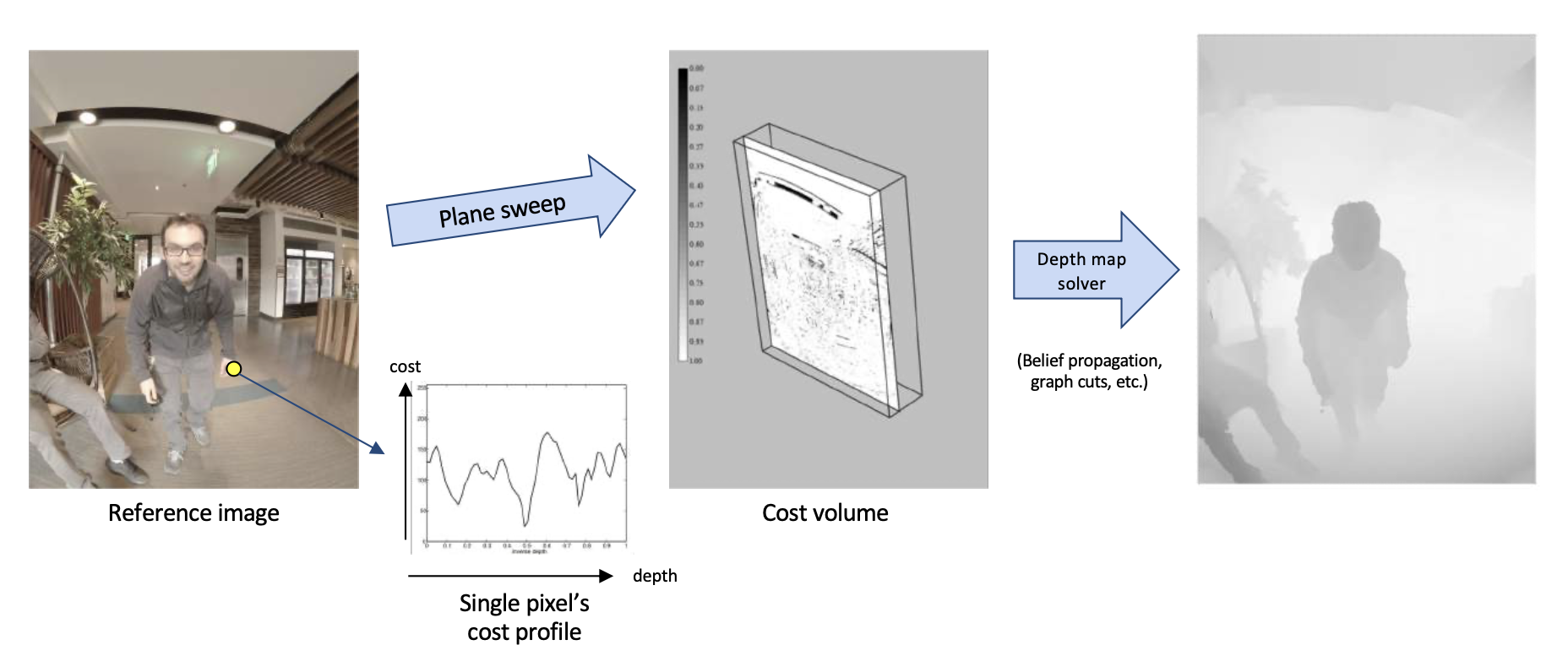
在传统的 MVS 方法中,会遇到以下挑战:

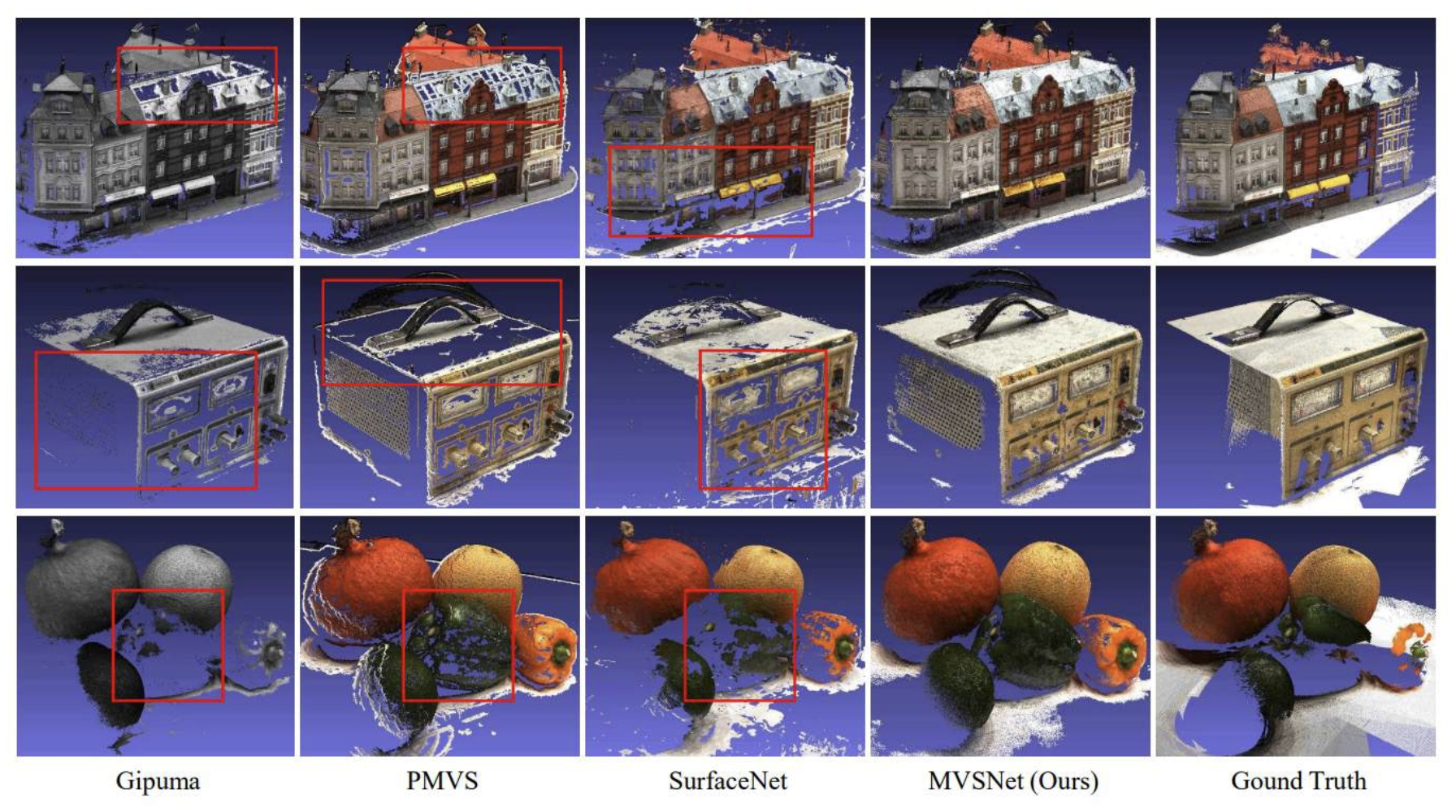
MVSNet:从 CNN 特征预测成本体积
例子
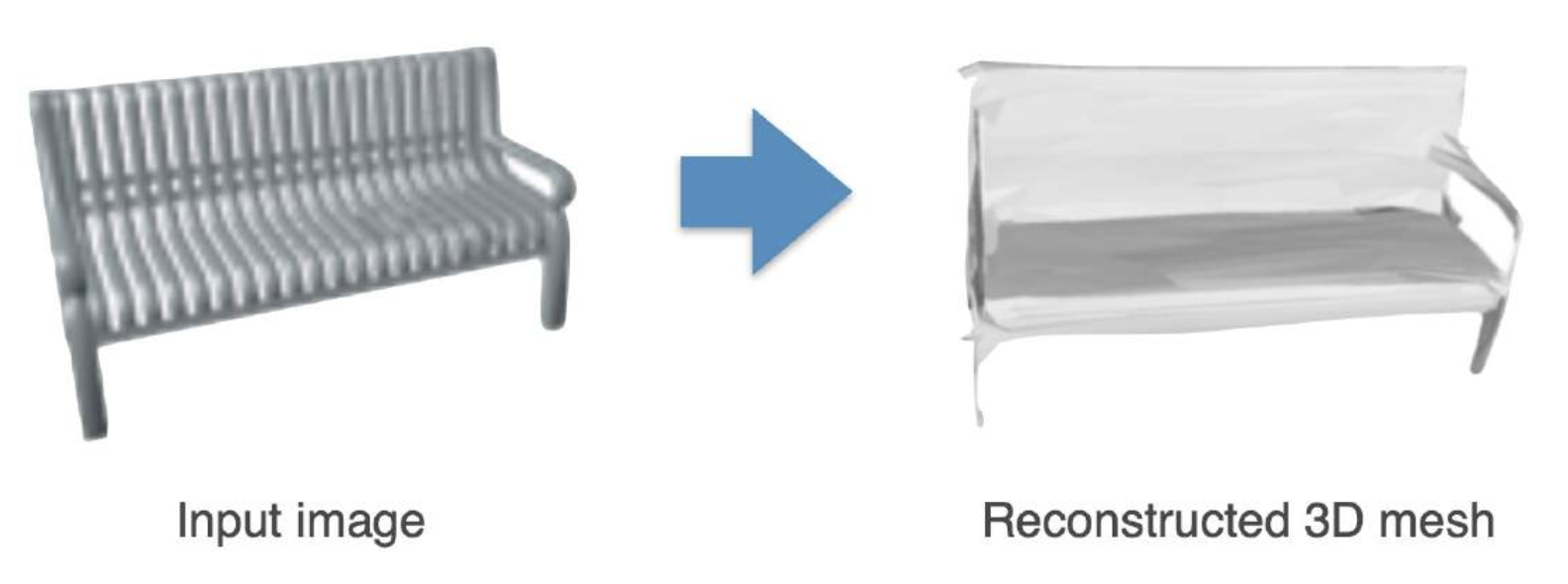
虽然可以通过比较渲染图像与输入图像来提高网格质量,但这并不容易,因为:
- 渲染过程不可微
- 网格表示不是优化中的良好表示
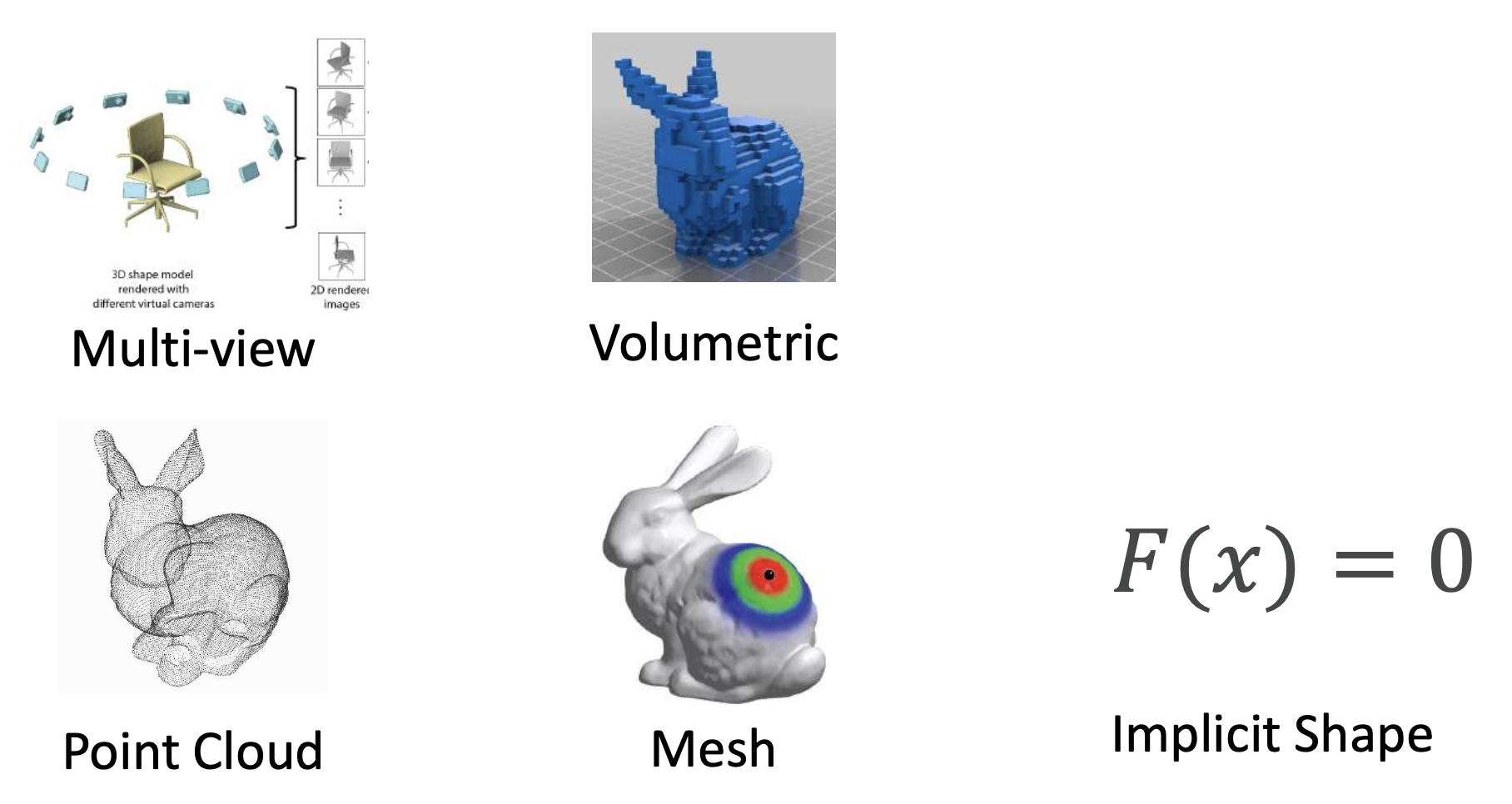
Implicit Representation⚓︎
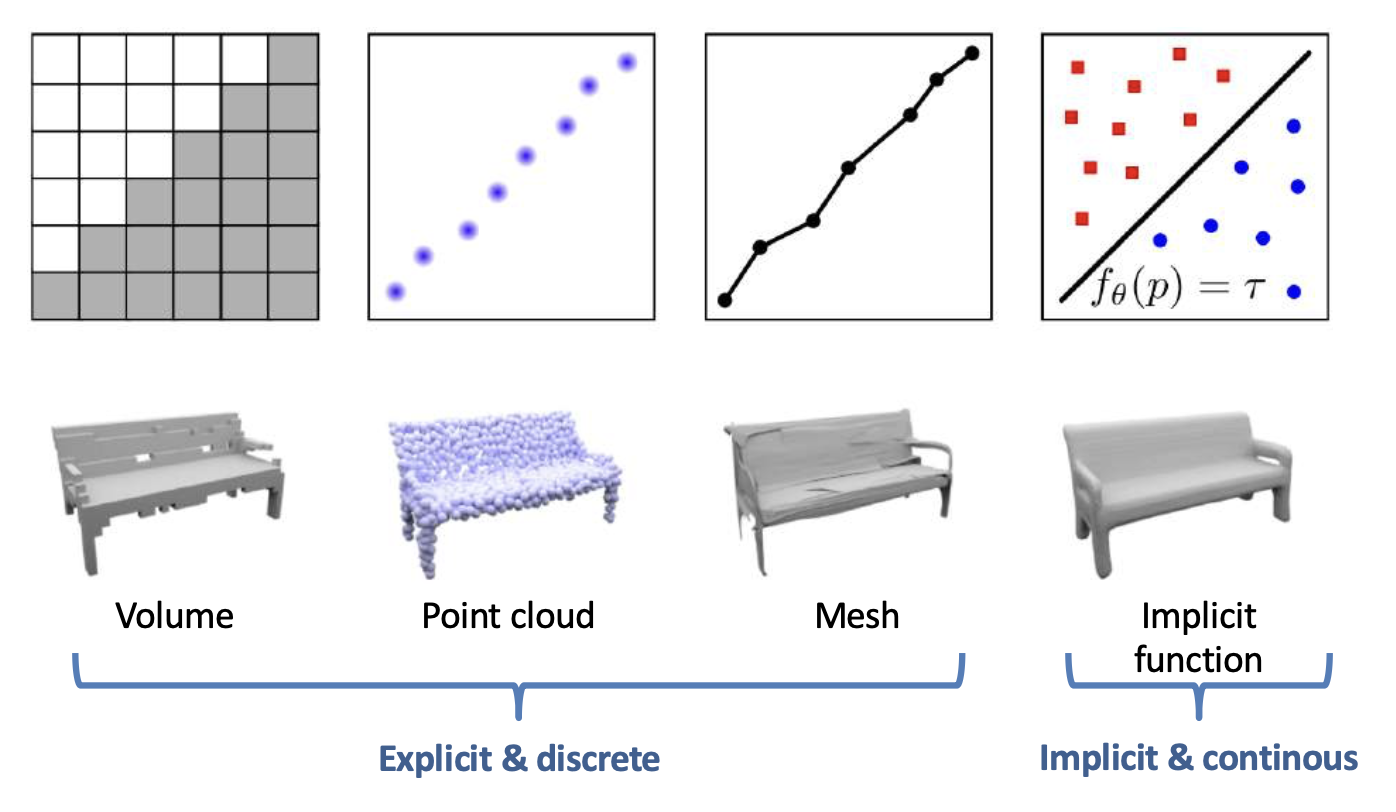
一个简单的例子是,当 \(f(p) = p_1^2 + p_2^2 + p_3^2\) 时,\(f(p) = 1\) 表示一个球体。
一般来说,隐式函数可以是:
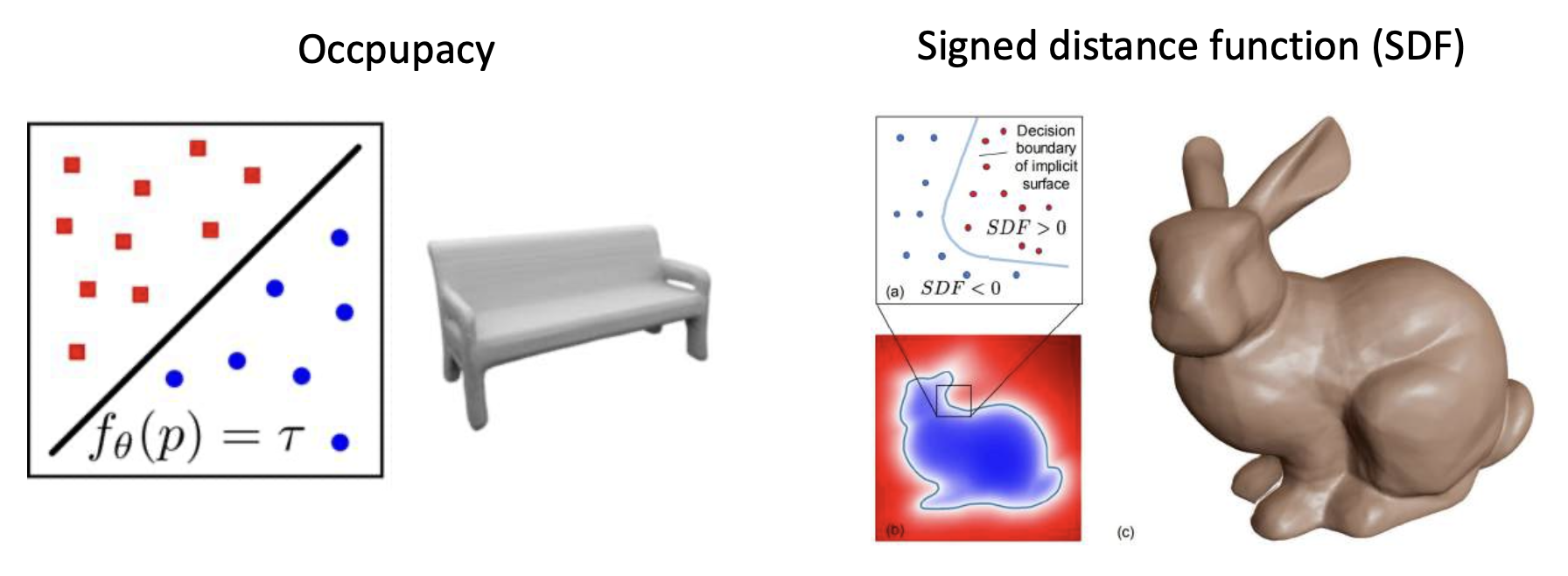
实际上,我们很难定义 \(f_\theta(p)\) 的形式。
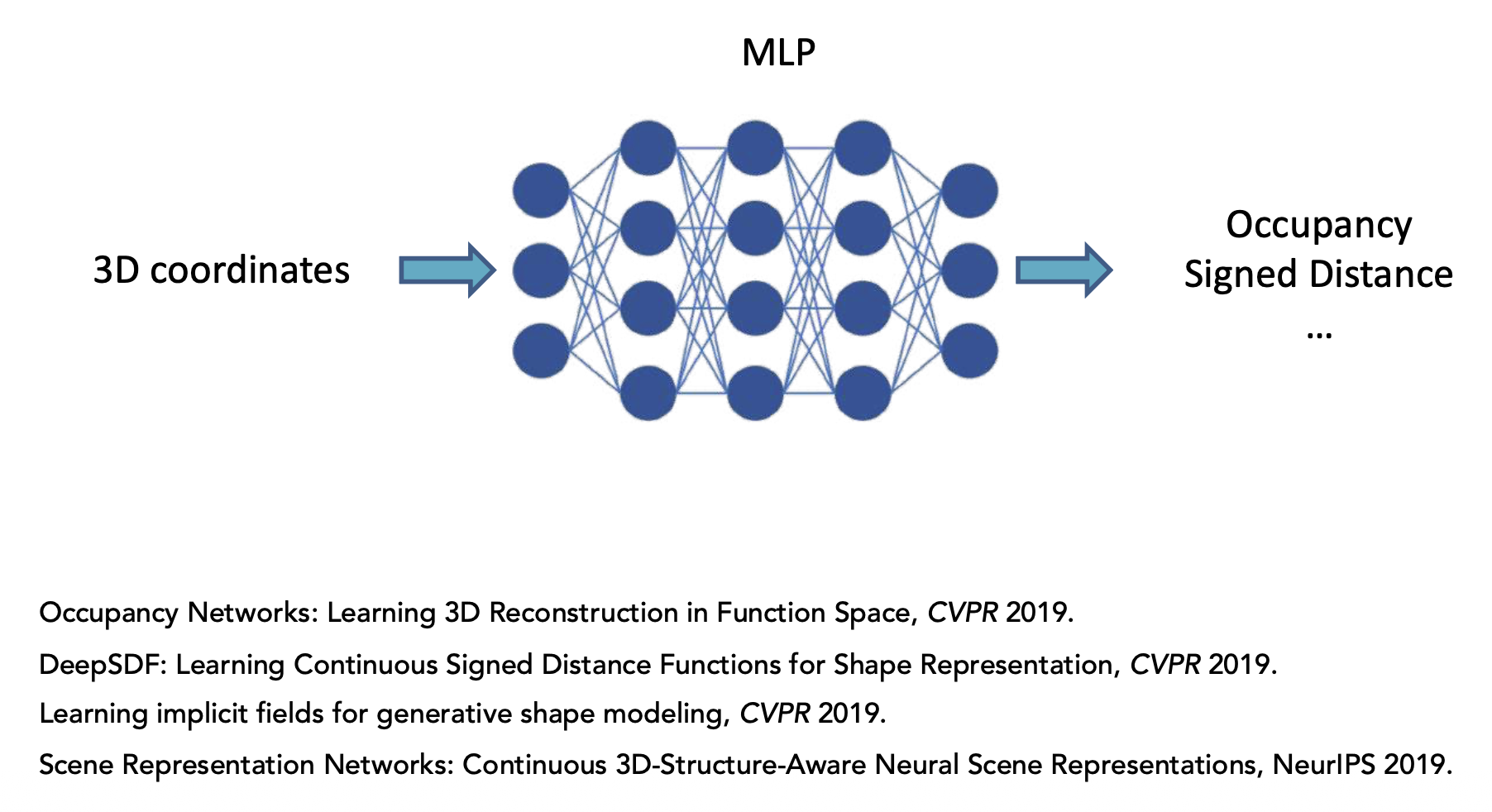
隐式神经表示:
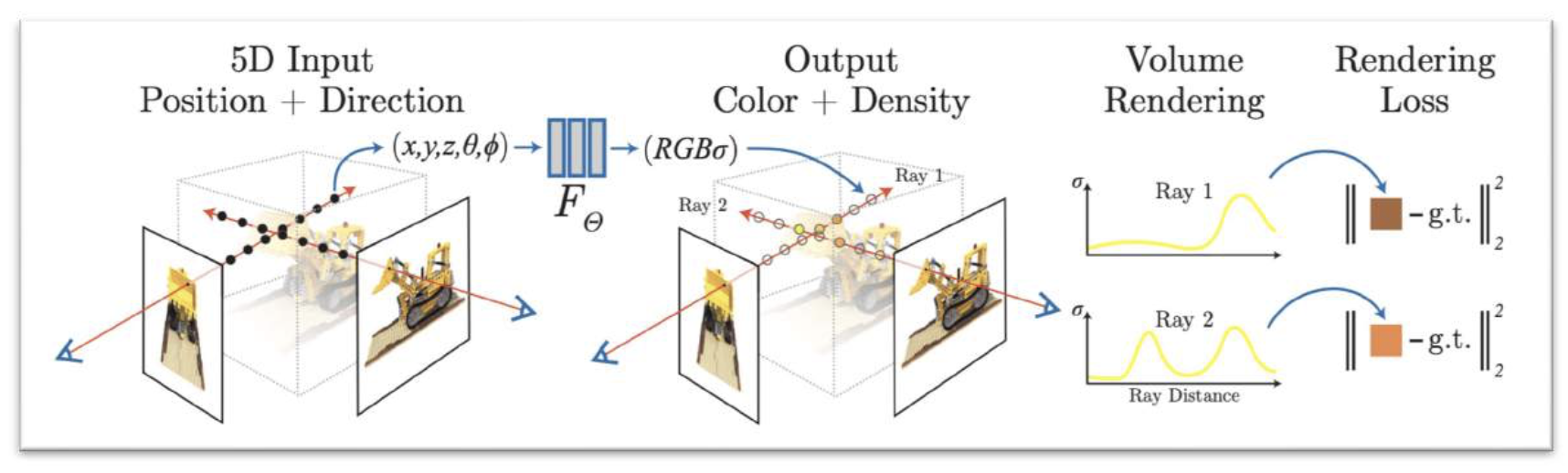
Neural Radiance Fields (NeRF)⚓︎
神经辐射场(neural radiance fields, NeRF):将场景表示为辐射场(radiance field)。
- 辐射度 (radiance) = 密度 + 颜色
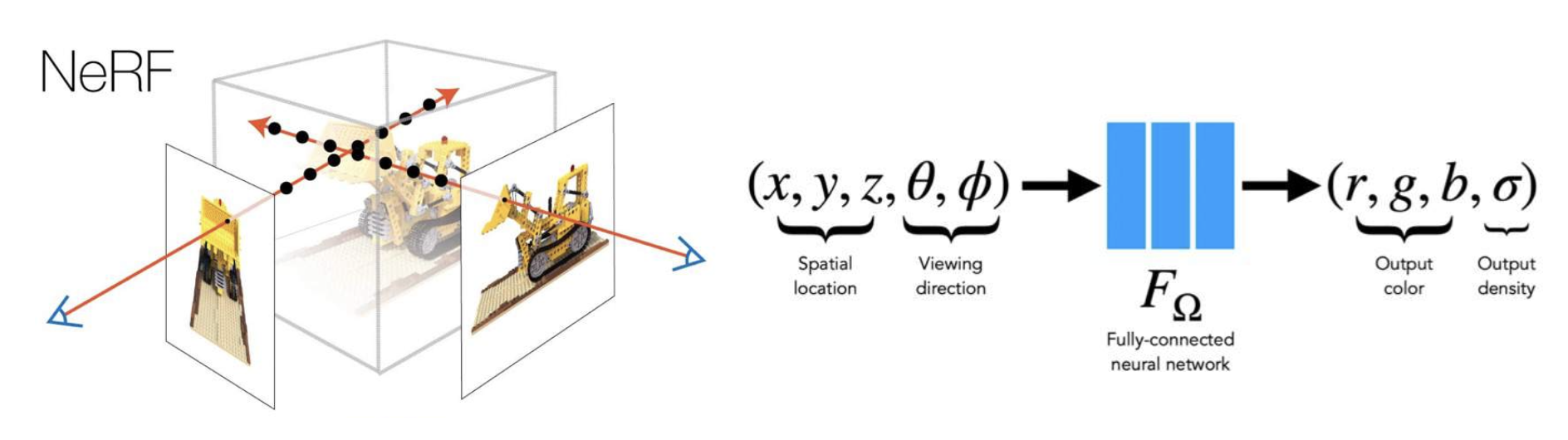
辐射场可以通过体渲染转换为图像,这是可微分的。
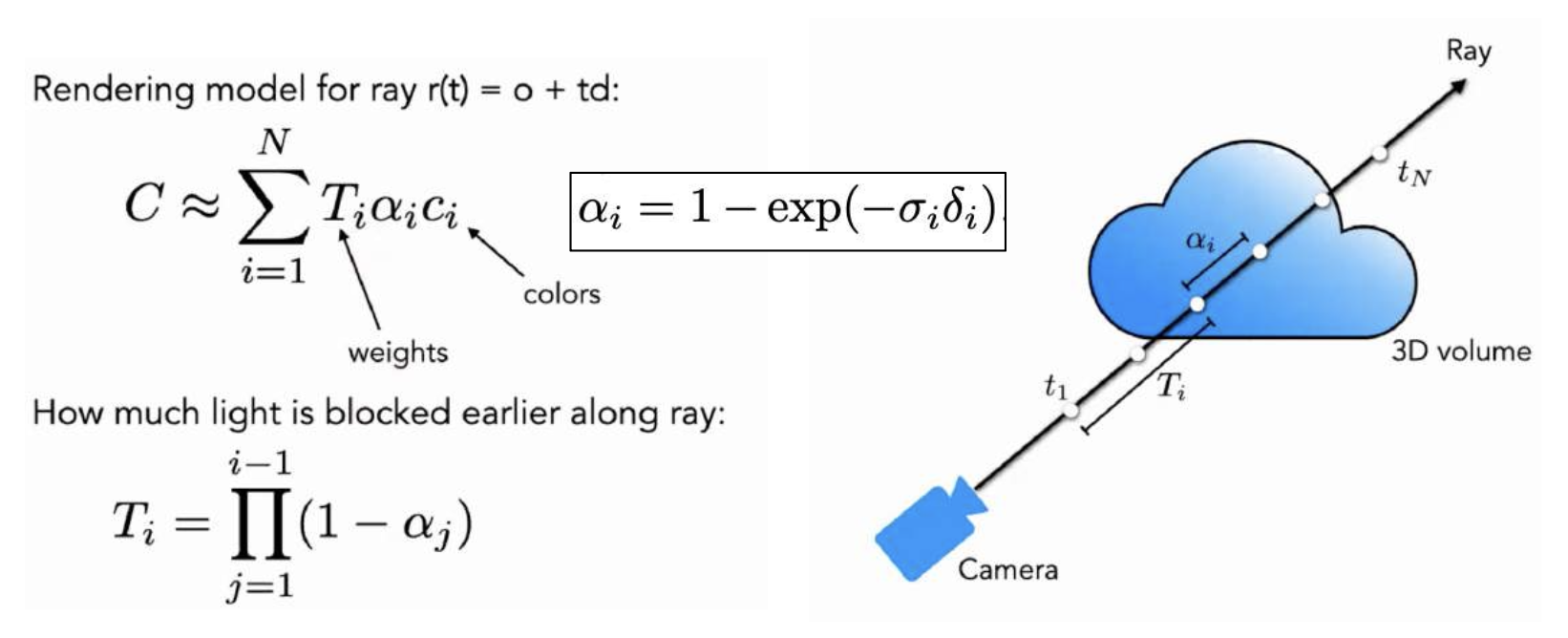
通过最小化渲染损失重建 NeRF:
效果
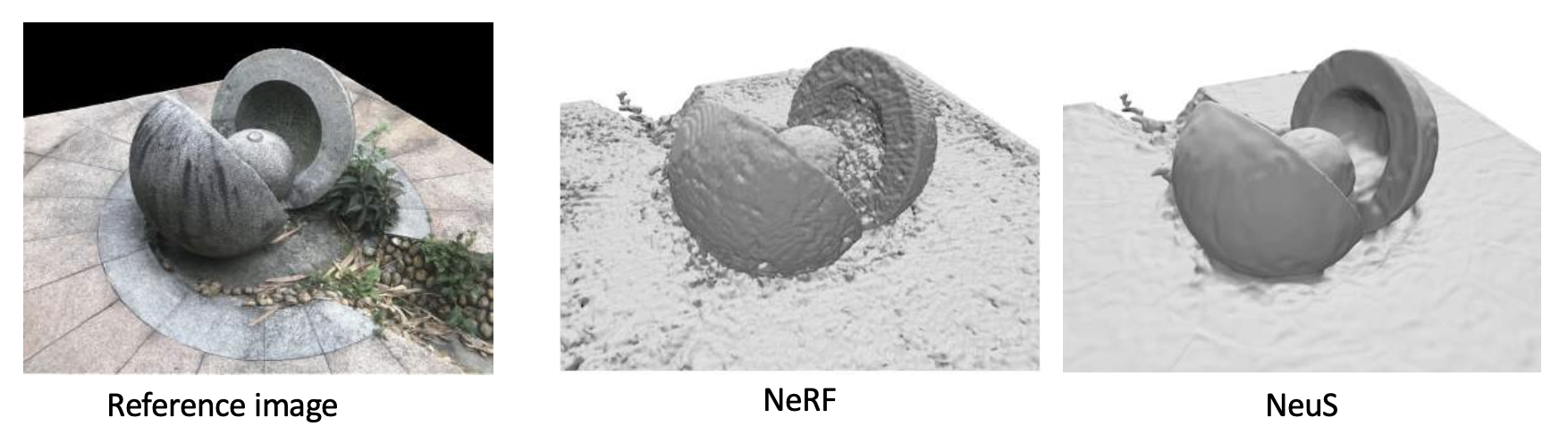
但是 NeRF 的表面重构质量较差:
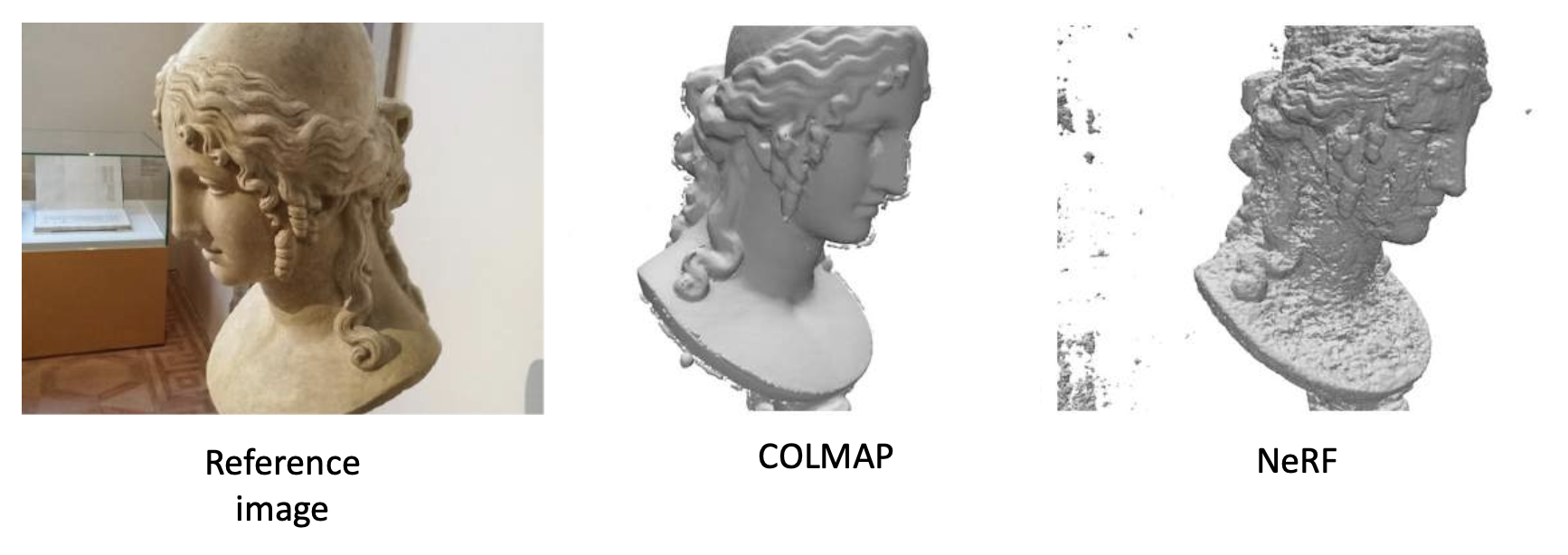
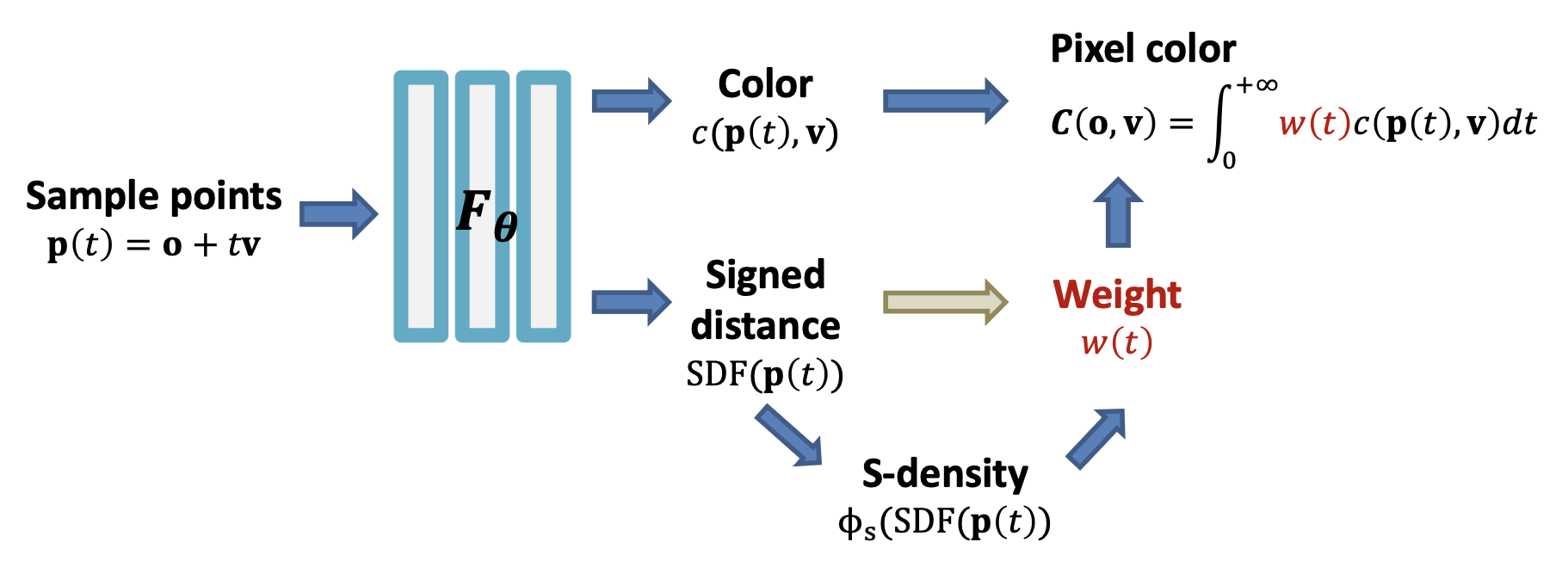
NeuS⚓︎
NeuS:用 SDF 替换密度场。
效果
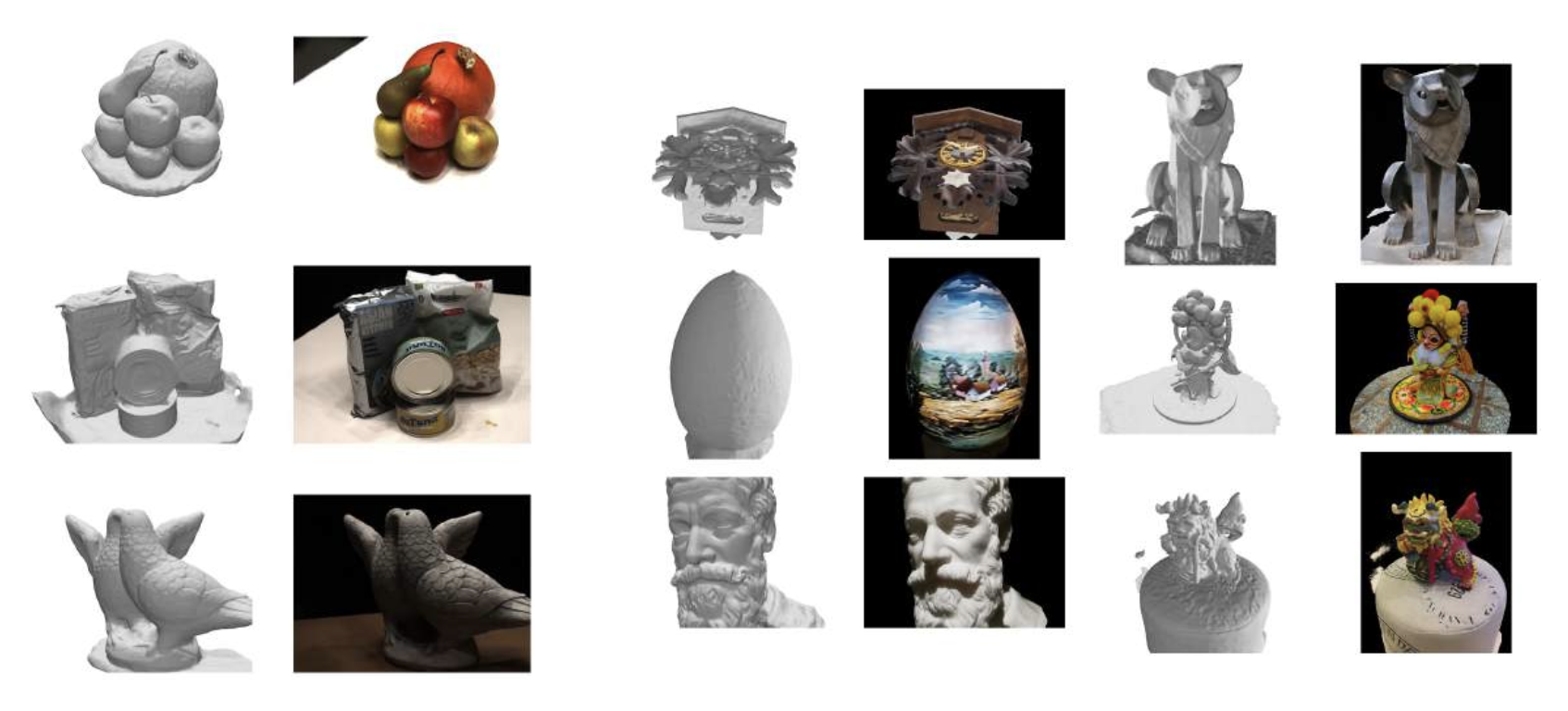
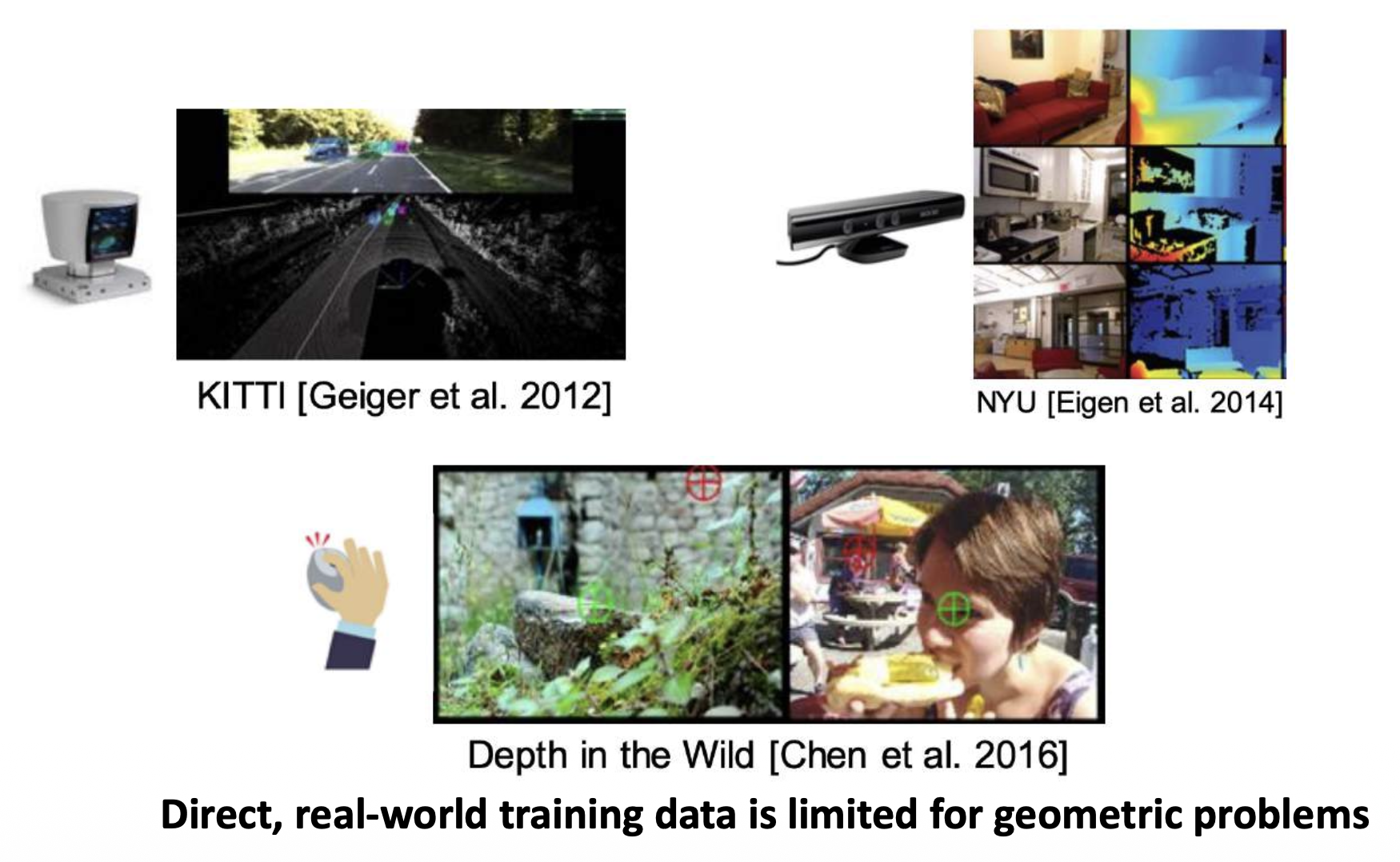
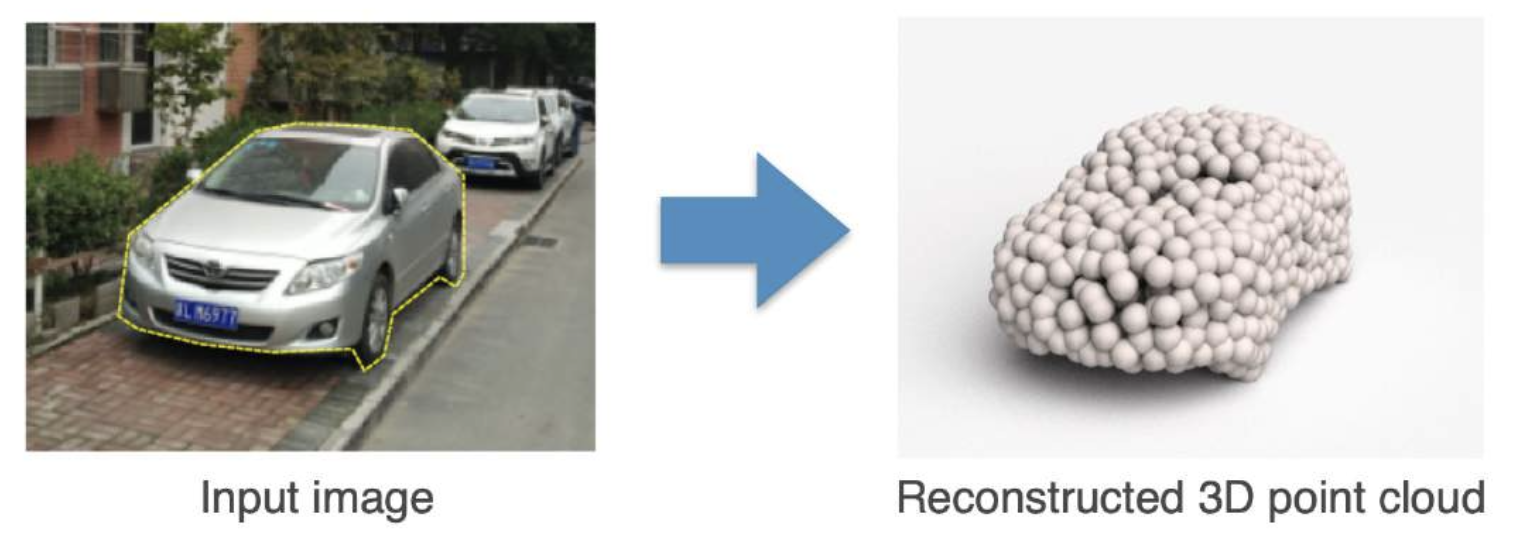
仅从单张图像推断 3D 表示
- 深度
- 点云
- 网格
- 体积
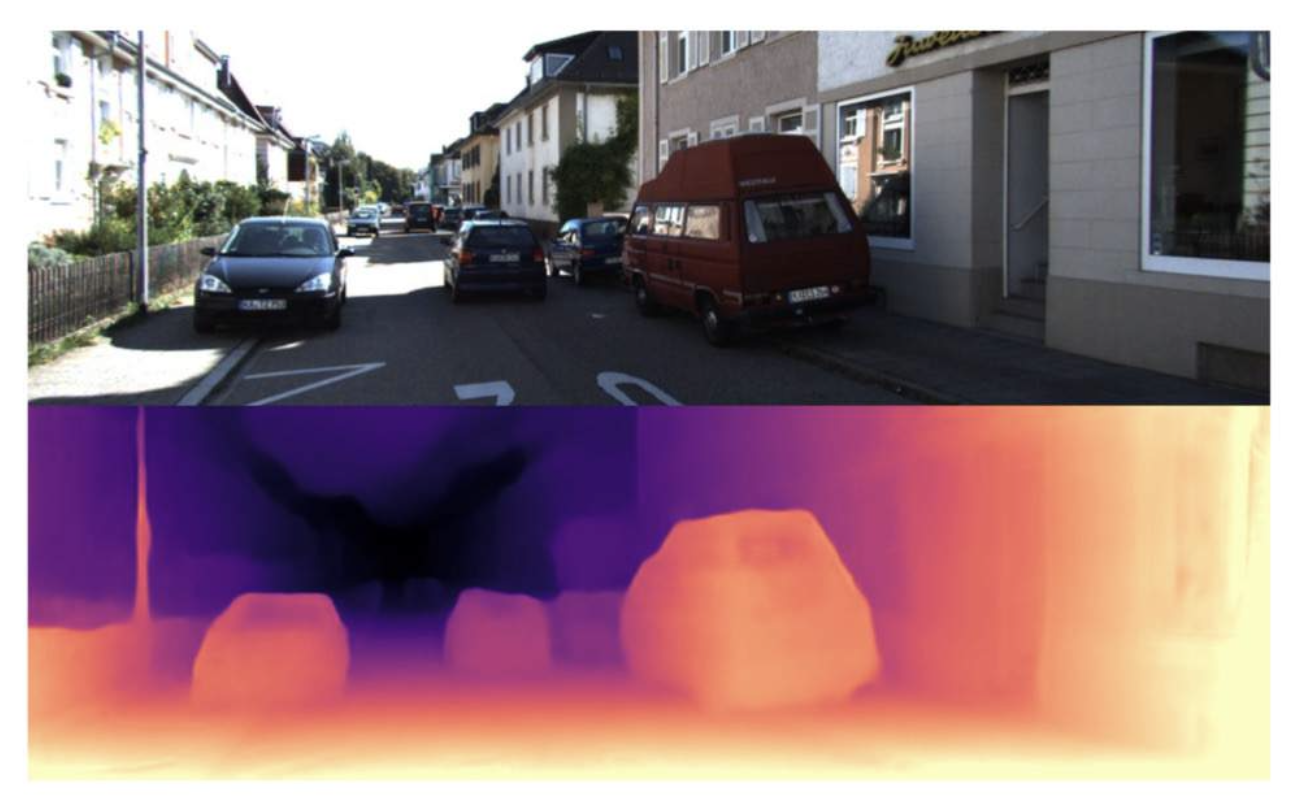
Monoculer Depth Estimation⚓︎
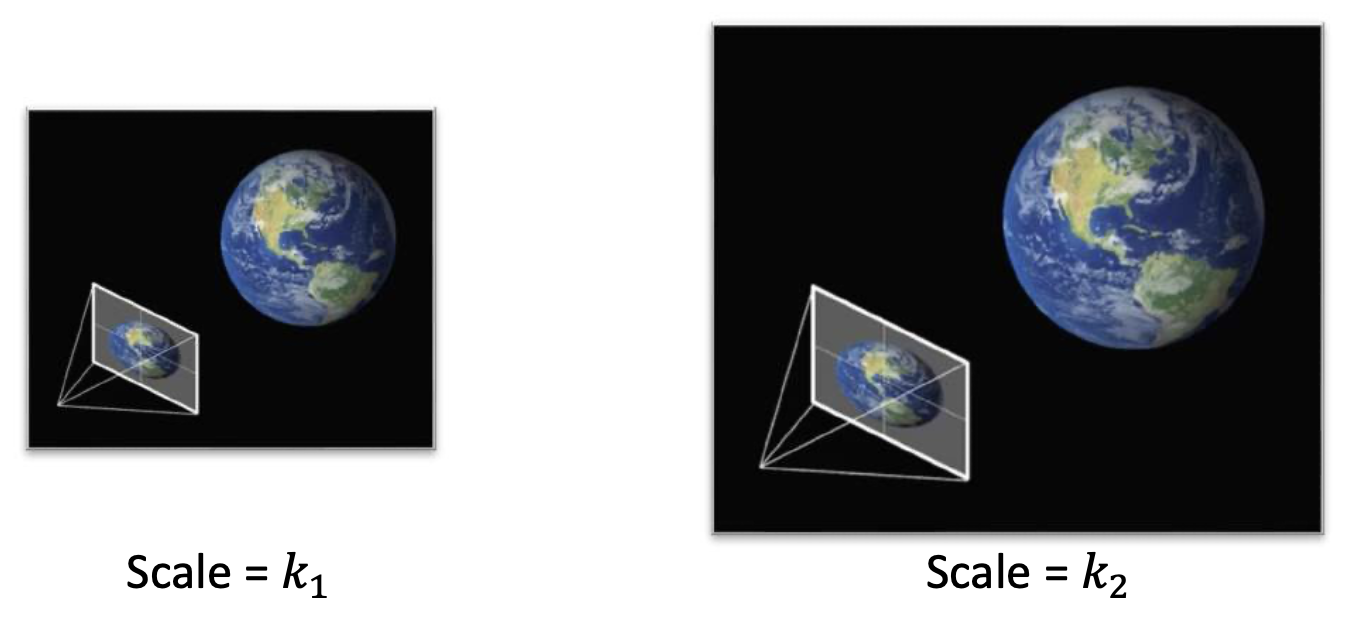
单目深度估计(monoculer depth estimation):
-
使用网络从单张图像中猜测深度
-
尺度模糊(scale ambiguity):不同大小和深度的同一物体给出相同的图像
-
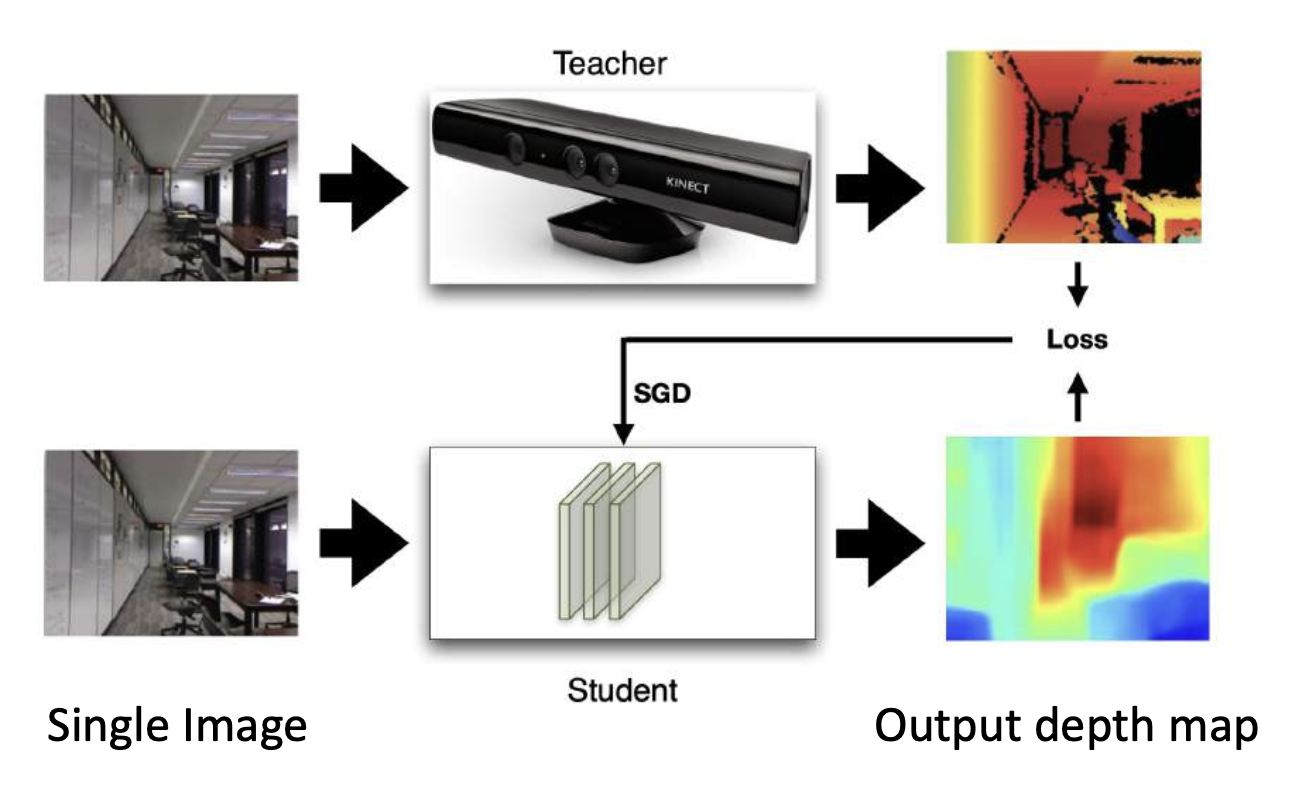
损失函数:尺度不变(scale-invariant) 深度误差
-
标准 L2 误差
\[ D_{L2}(y, y^*) = \frac{1}{n} \sum_{i=1}^{n} (\log y_i - \log y^*_i)^2 \] -
尺度不变误差
\[ \begin{aligned} D_{SI}(y, y^*) = \frac{1}{n} \sum_{i=1}^{n} &\left(\log y_i - \log y^*_i + \alpha(y, y^*)\right)^2 \\ & \text{with } \alpha(y, y^*) = - \frac{1}{n} \sum_{j=1}^{n} (\log y_j - \log y^*_j) \end{aligned} \]
-
-
训练数据来源:
-
MegaDepth 数据集:> 130k 对(RGB,深度图)
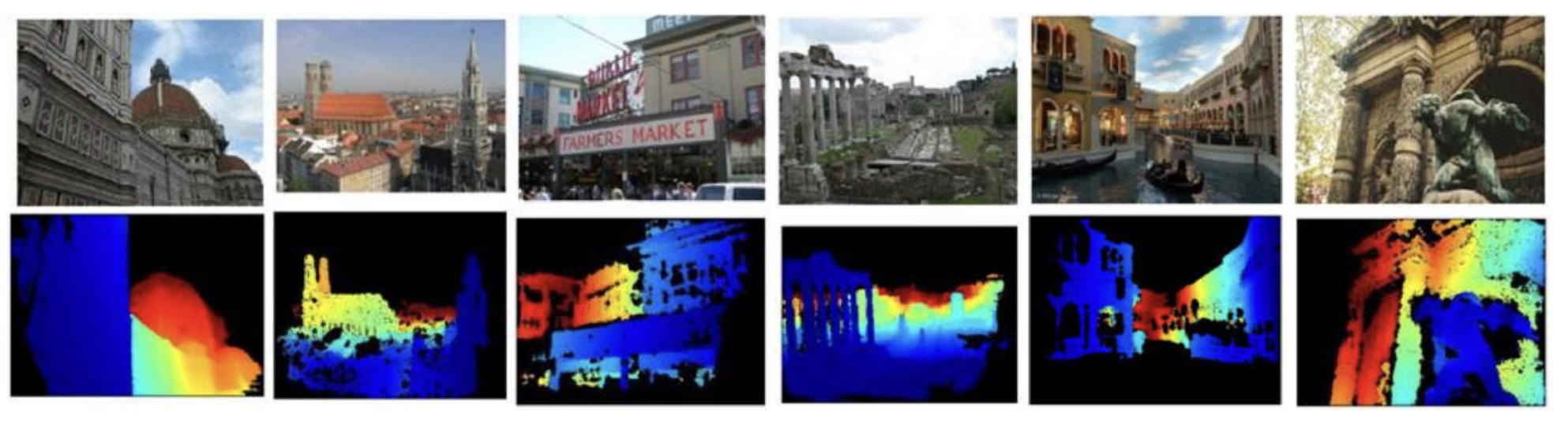
- 来自互联网上的图像
- 由世界 200 多个地标生成
- 使用 COLMAP 的 SfM + MVS 重建
-
Single-View Shape Estimation⚓︎
3D 生成(来源:https://github.com/threestudio-project/threestudio
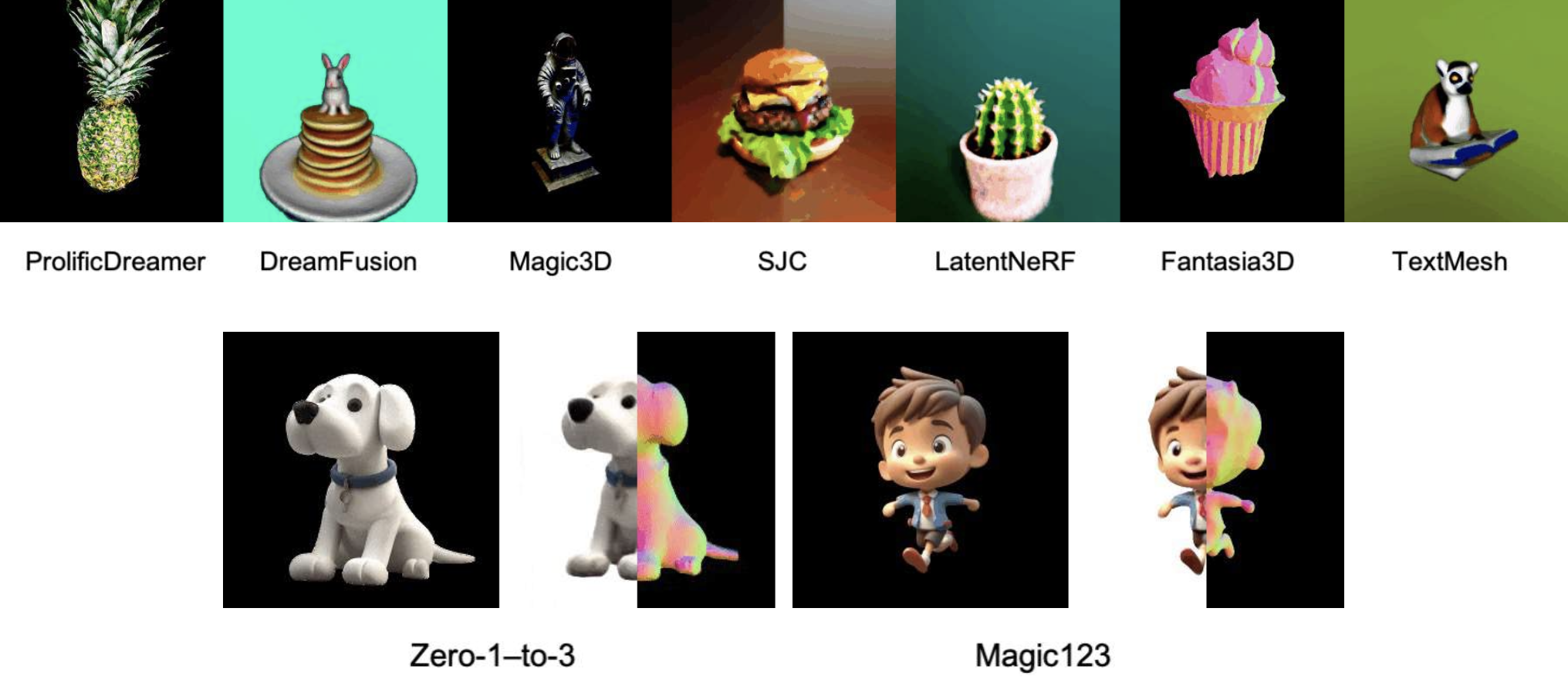
内容过时了,现在的技术明显强很多 ...
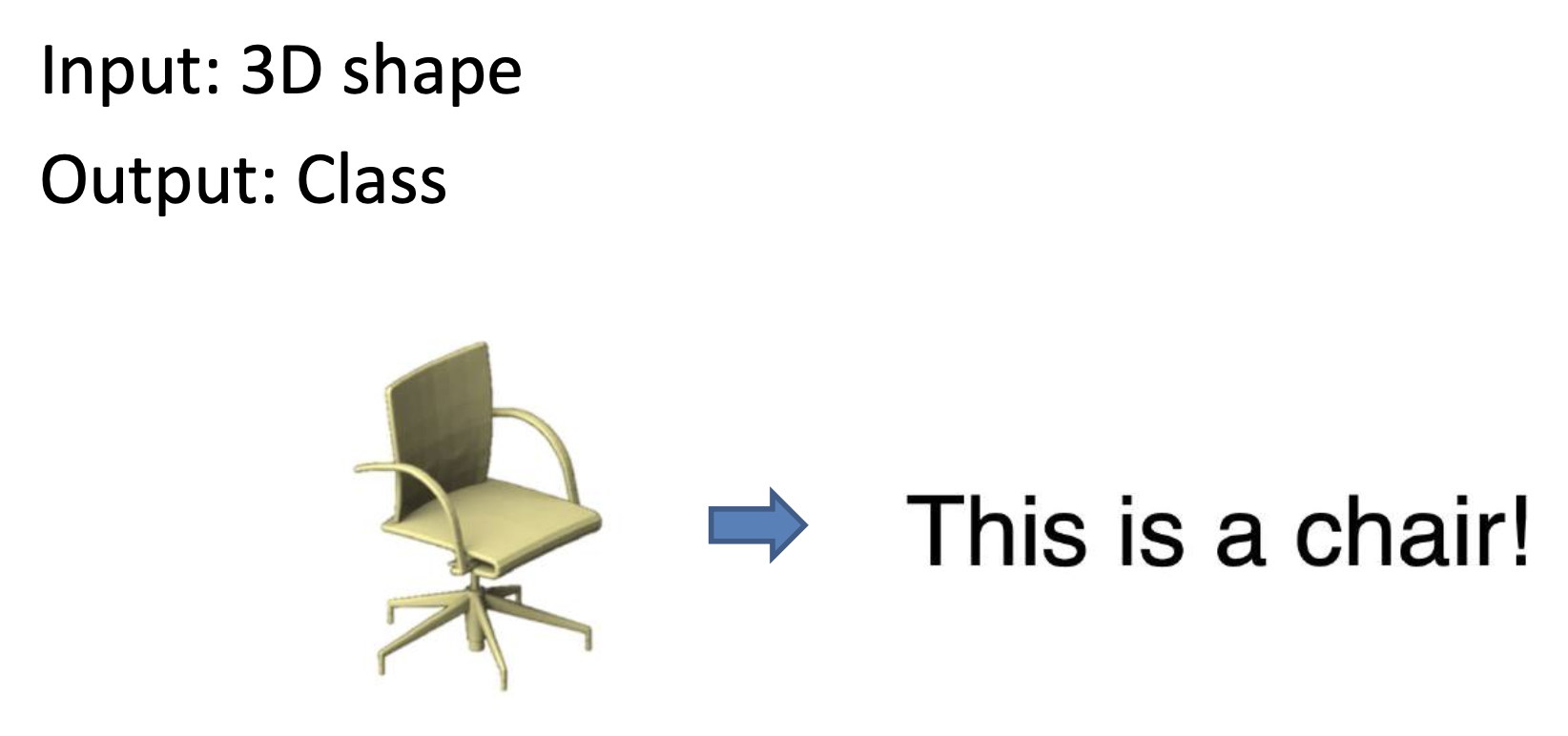
3D Understanding⚓︎
3D 分类:
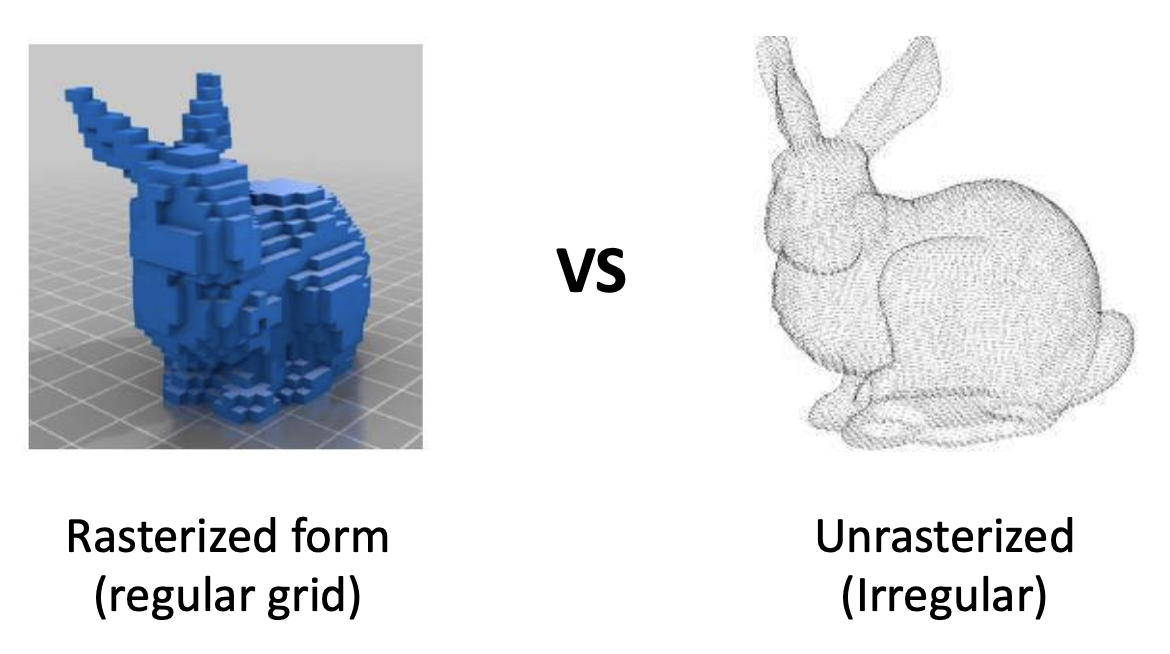
3D 数据表示:
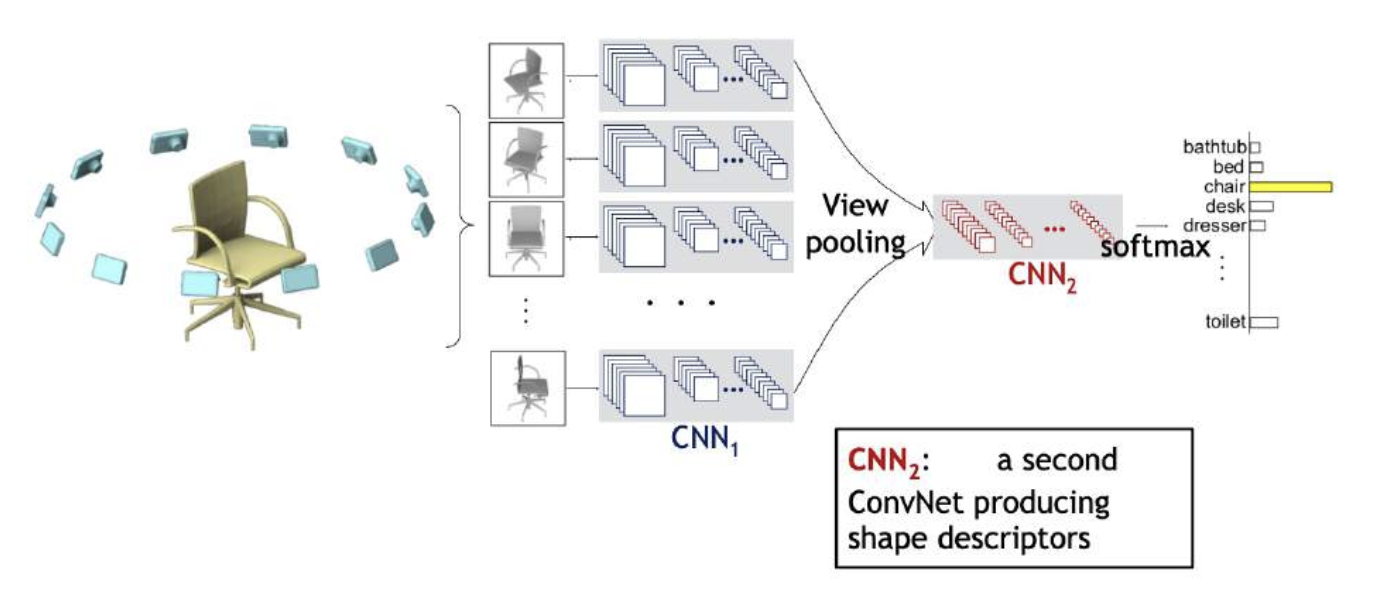
Multi-View CNN⚓︎
-
给定一张输入图像

-
使用多台虚拟相机渲染
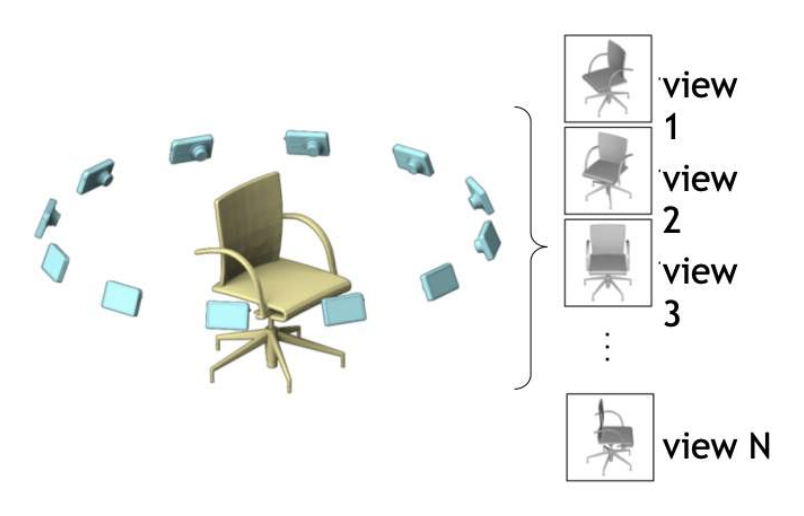
-
将渲染图像传给 CNN
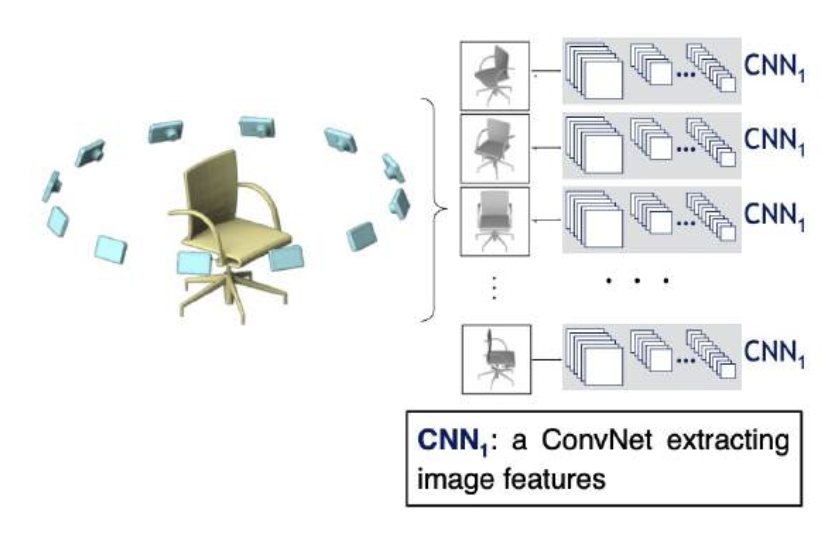
-
所有图像特征都被池化过后,通过 CNNs 进行处理,以生成最终预测
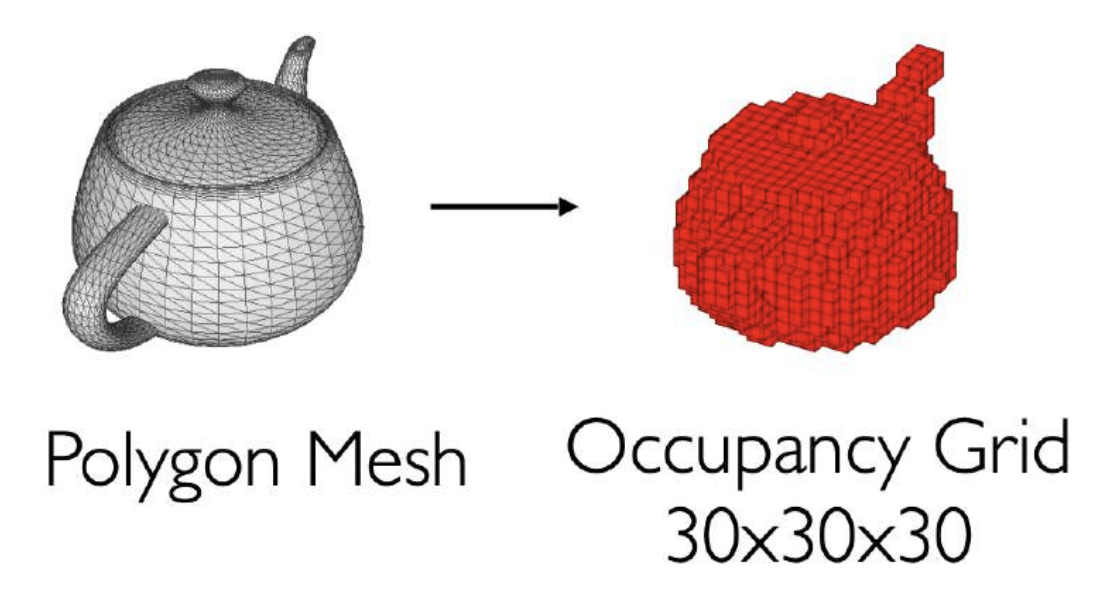
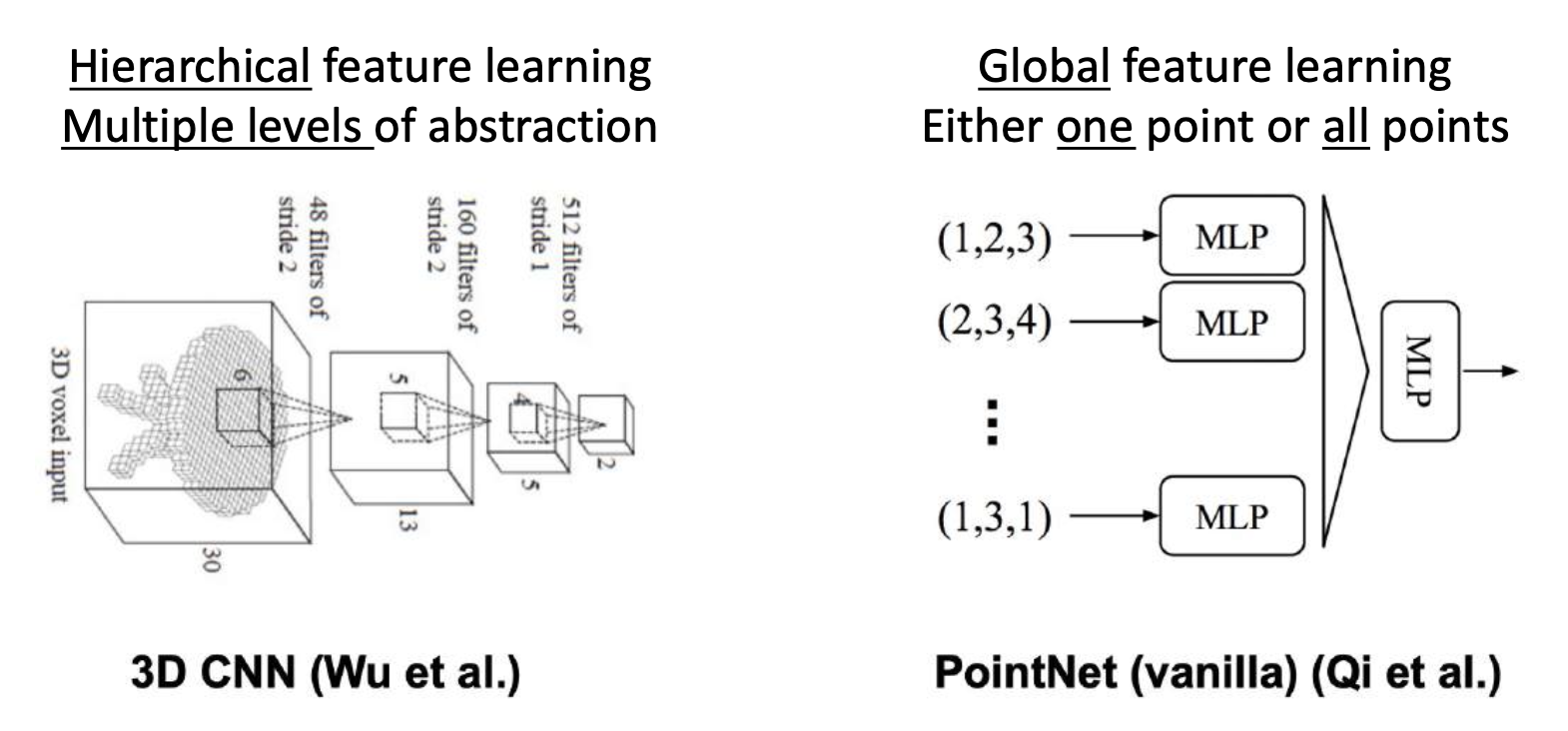
3D ConvNets⚓︎
三维体数据(3D volumetric data):
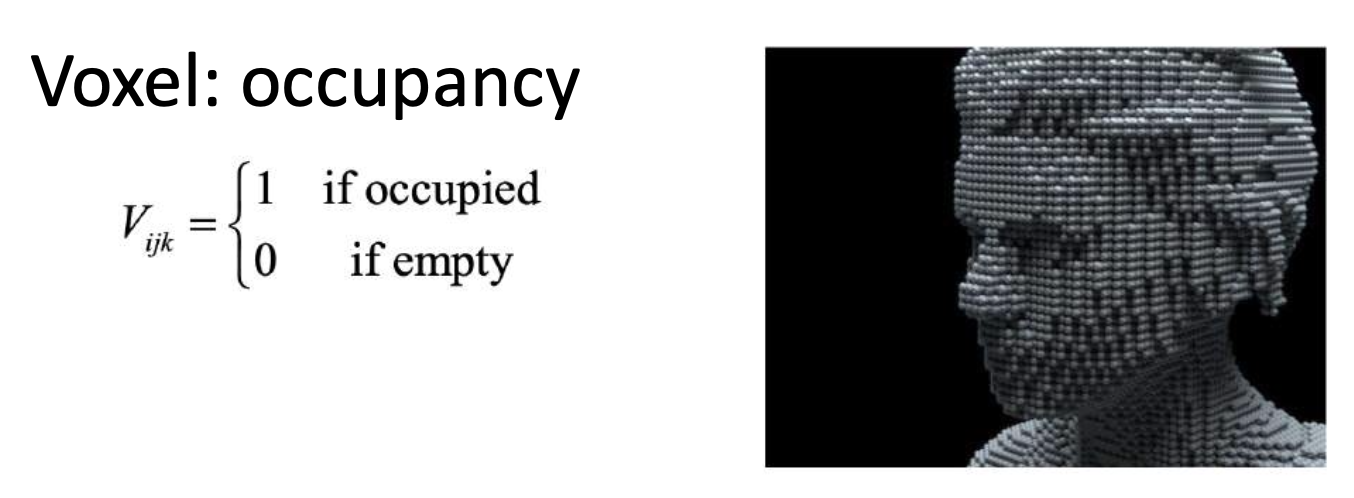
可以用三维卷积处理这类数据:
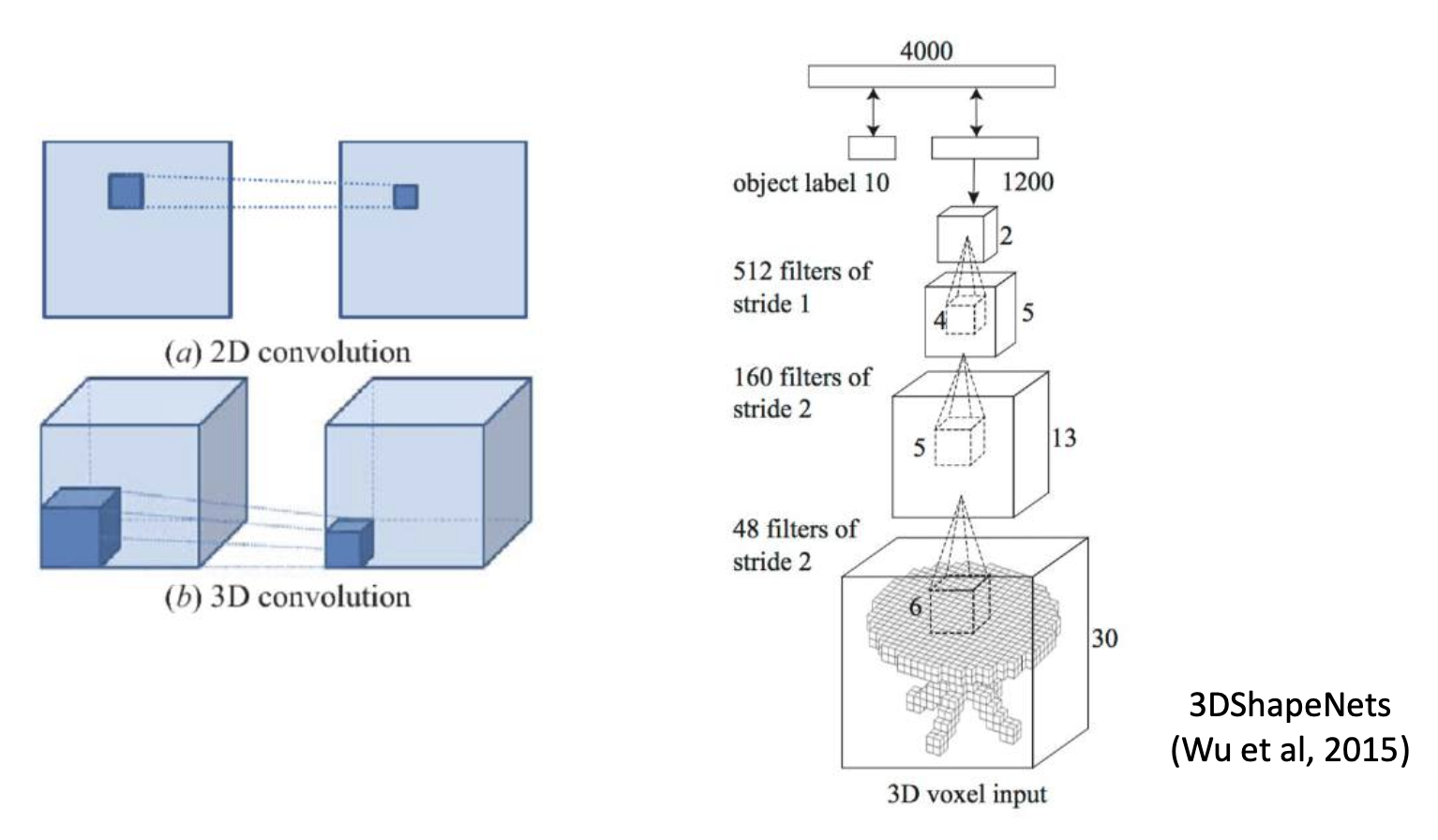
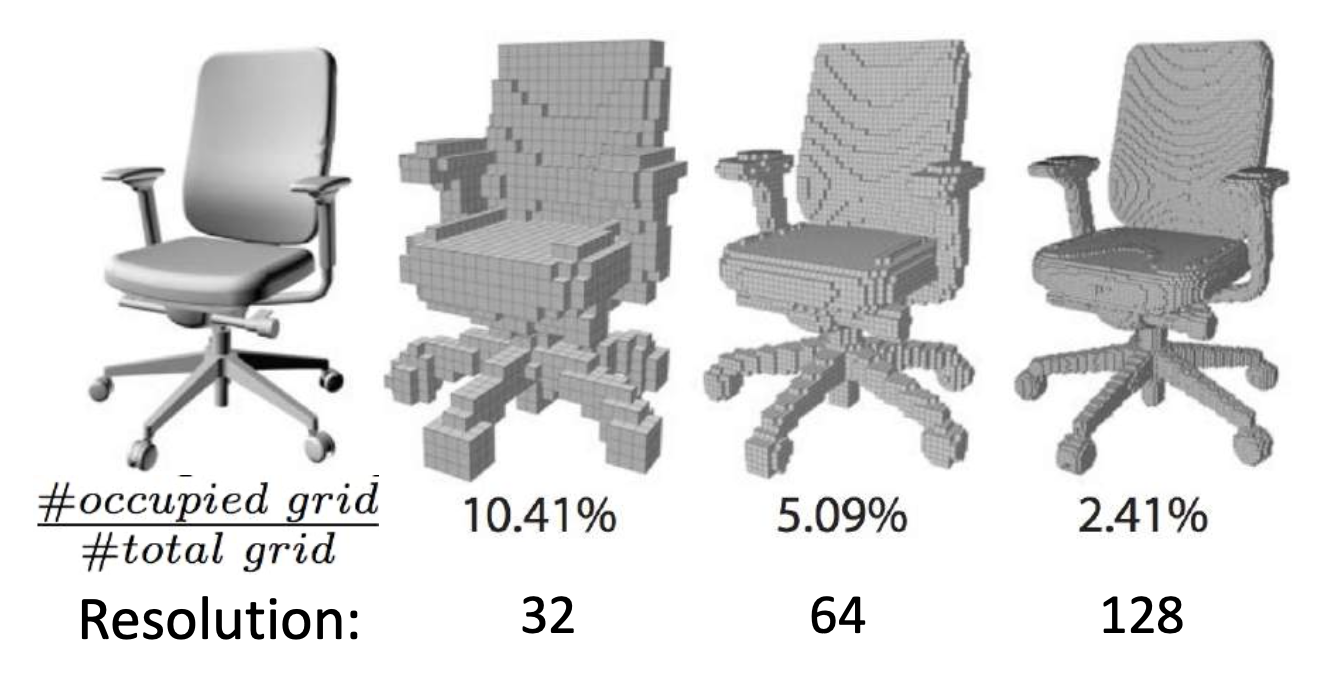
挑战:时间 / 空间复杂度相当高(\(O(N^3)\))
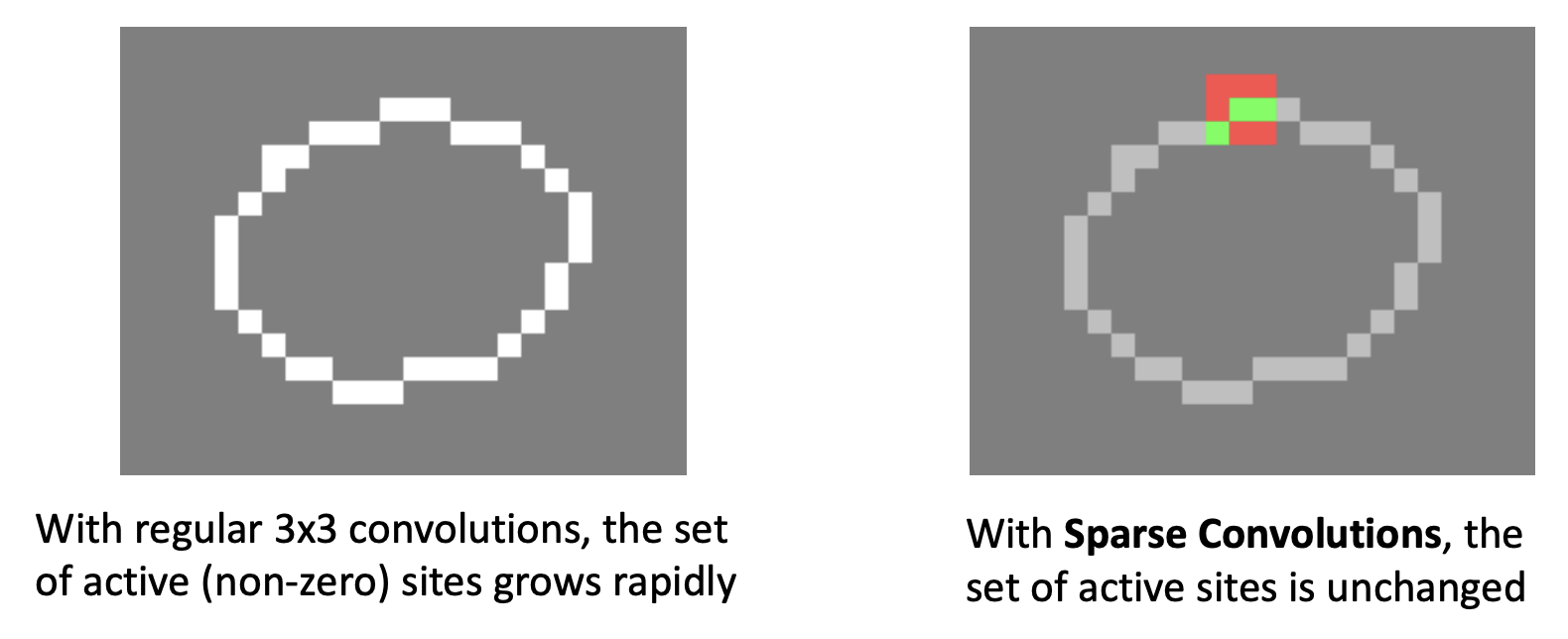
解决思路:利用三维形体的稀疏性(sparity)。
- 存储稀疏表面信号(八叉树(octree))
-
限制表面附近的计算
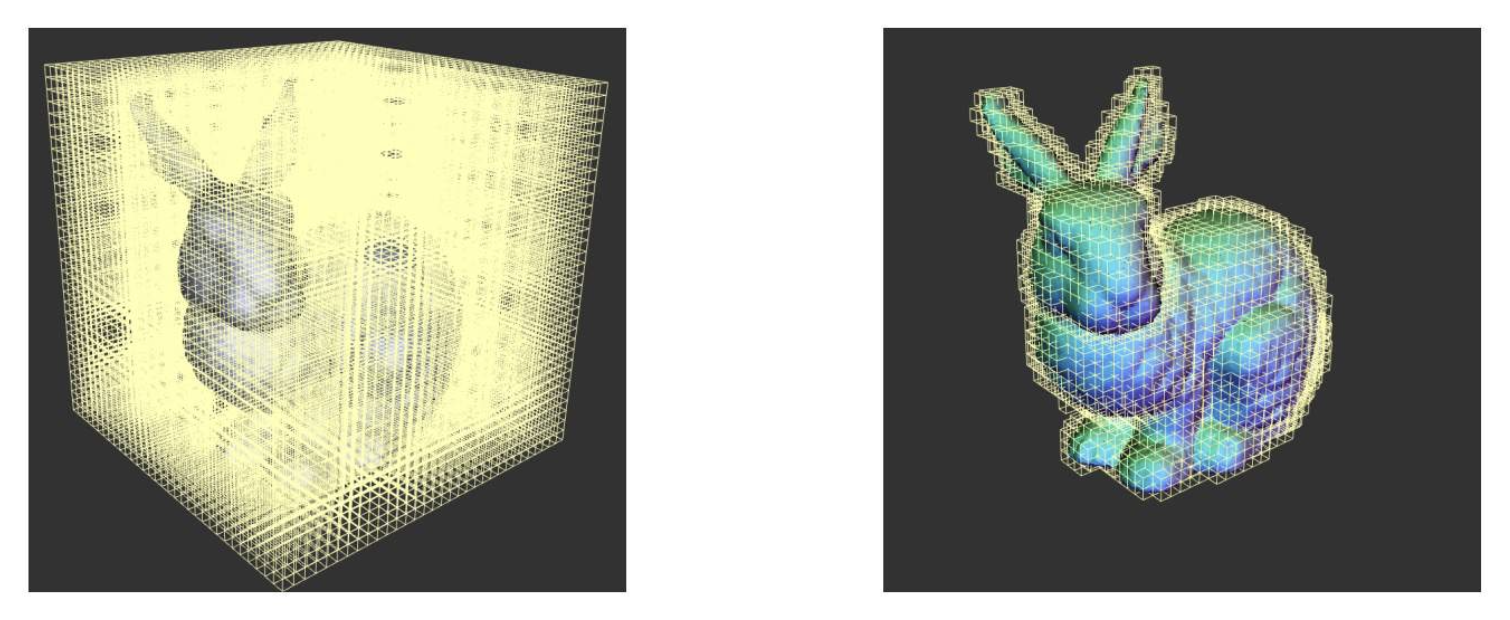
-
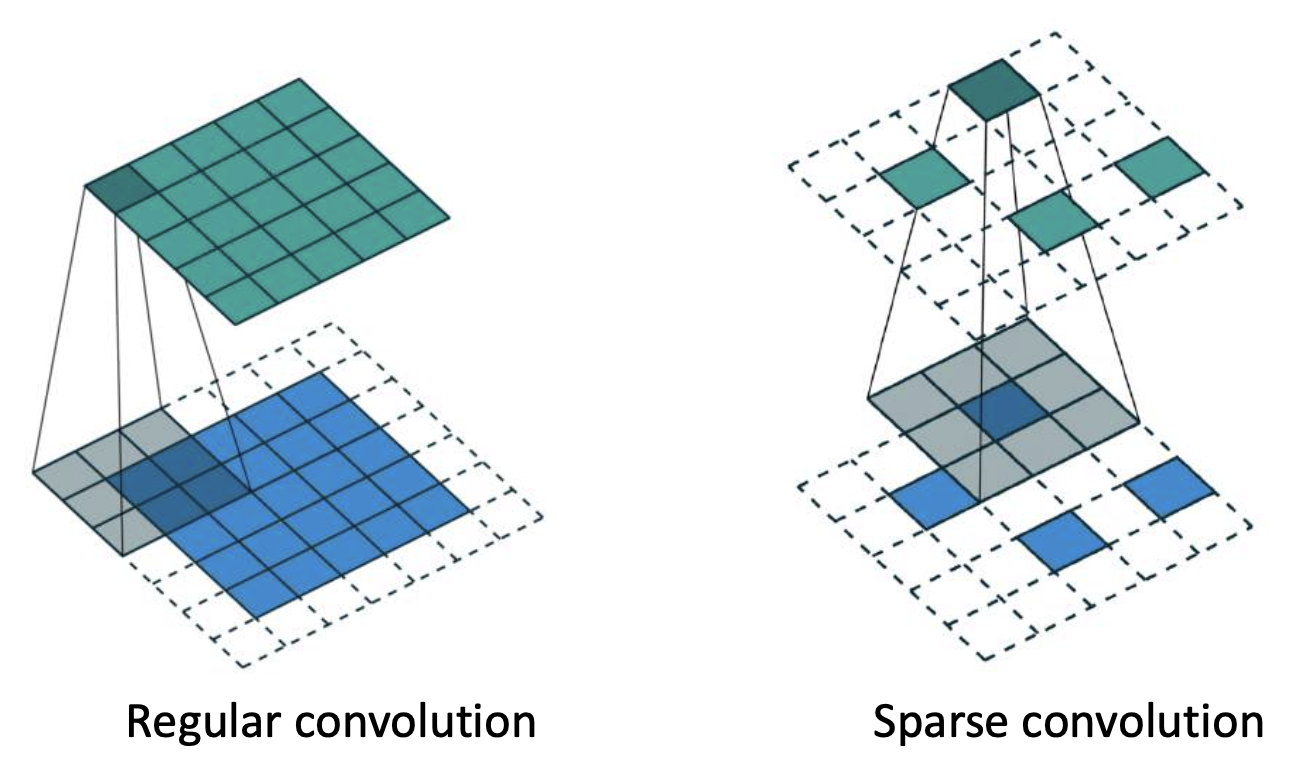
稀疏卷积(sparse convolution):仅在活跃位置(非零条目)计算内积 >网址:https://github.com/facebookresearch/SparseConvNet
PointNet⚓︎
接下来看如何用神经网络处理点云(pointcloud) 数据。会遇到的挑战有:
- 点云是未光栅化的(unrasterized) 数据
- 无法应用卷积
PointNet 是一种多任务(分类、检测、分割、配准等)点云处理架构。
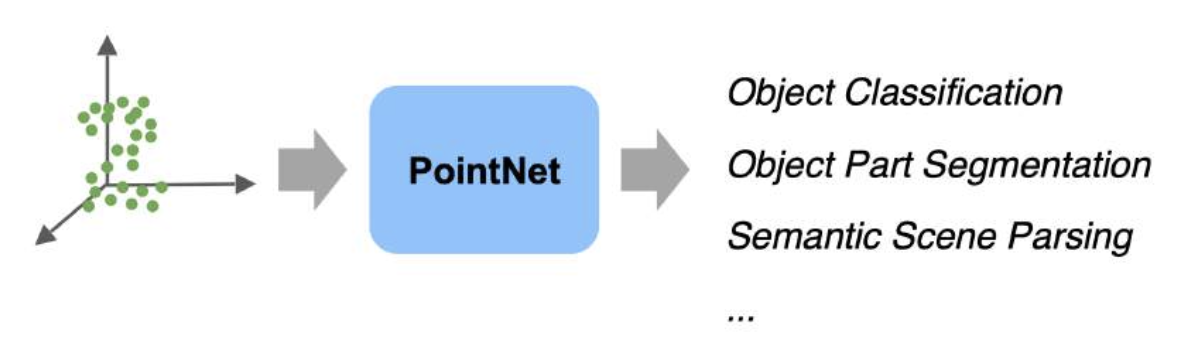
其中,点云是 N 个无序(orderless) 点,每个点用 D 维坐标表示
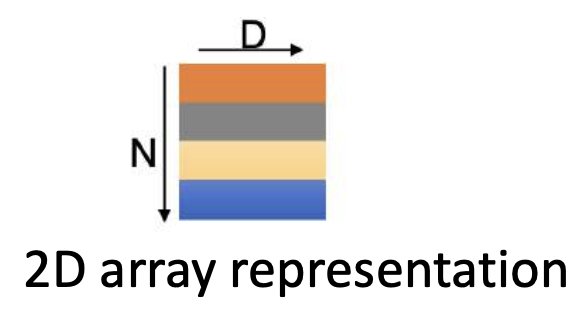
PointNet 分类和分割架构:
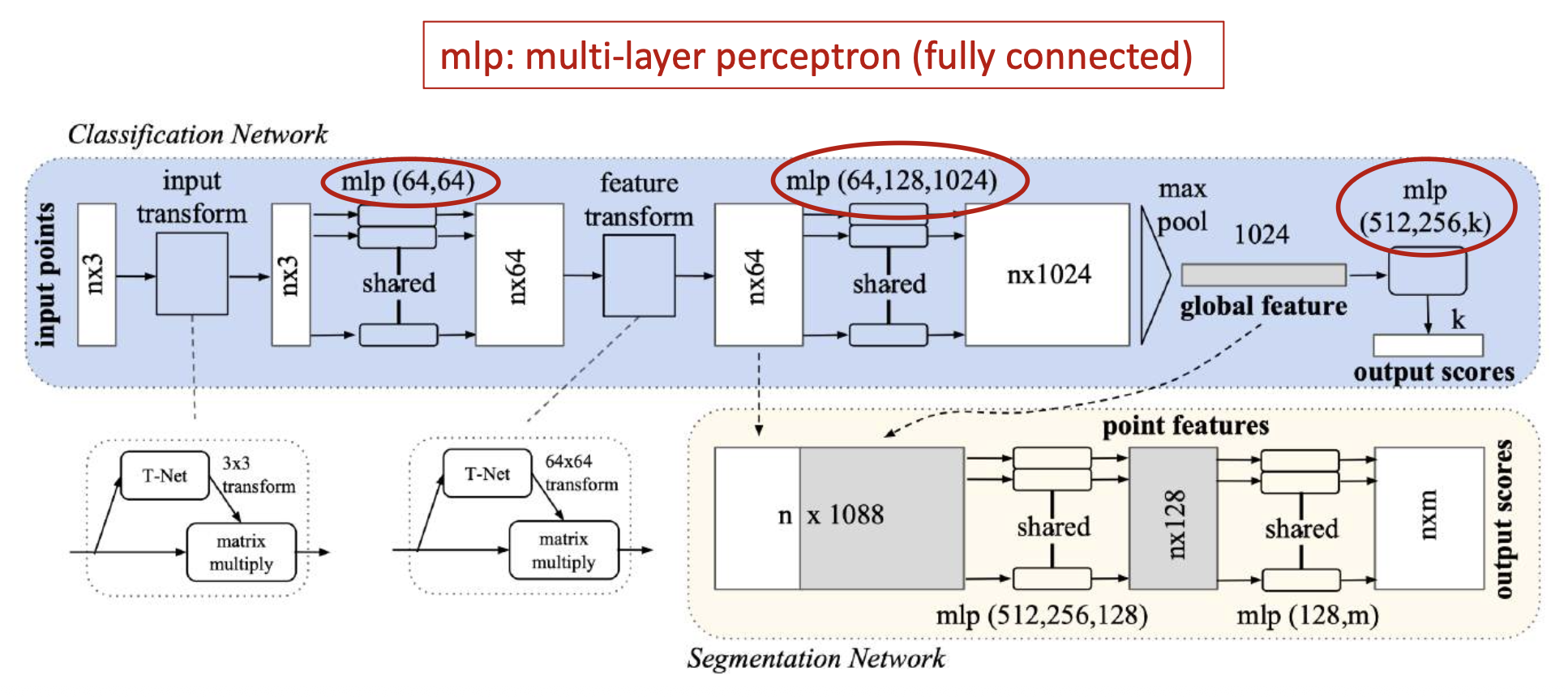
挑战:
-
点集是无序的
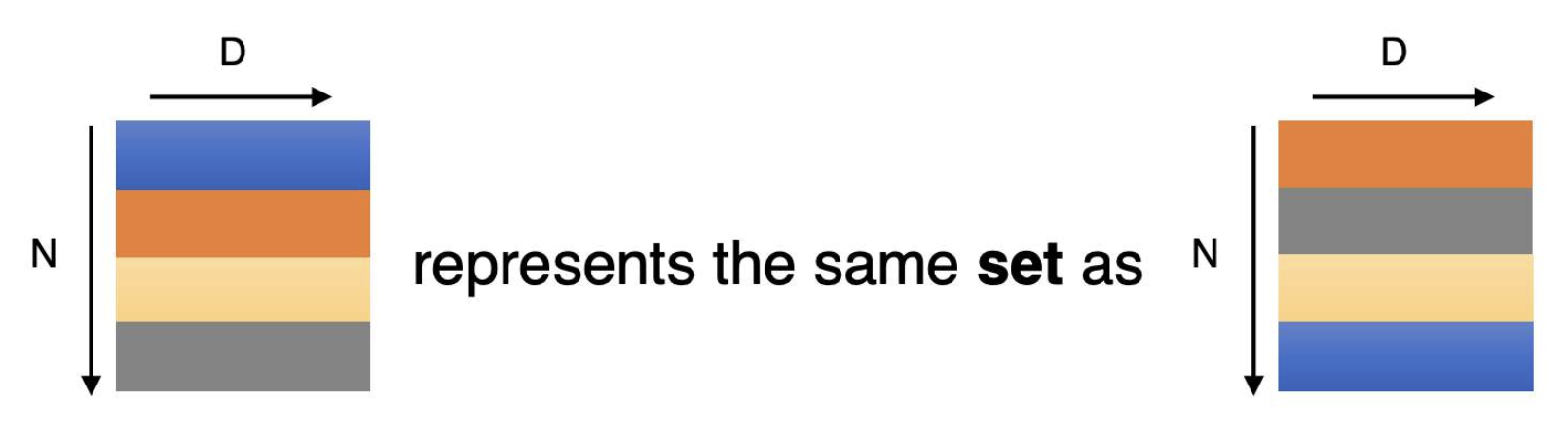
- 输出需要对于 N! 种排列保持不变
-
解决方案:利用最大池化,使输出对输入点的顺序不变
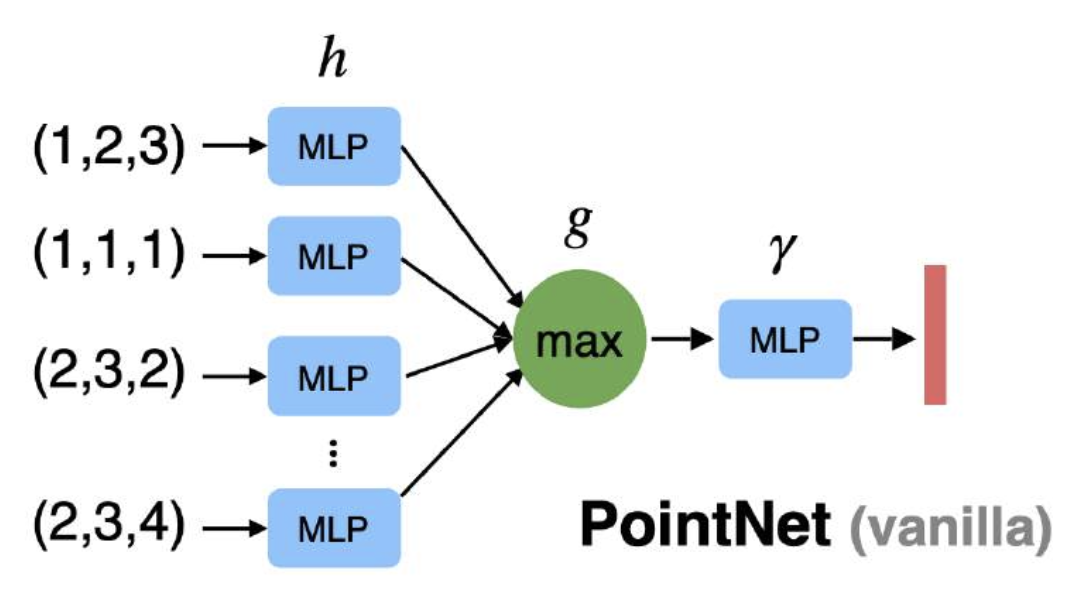
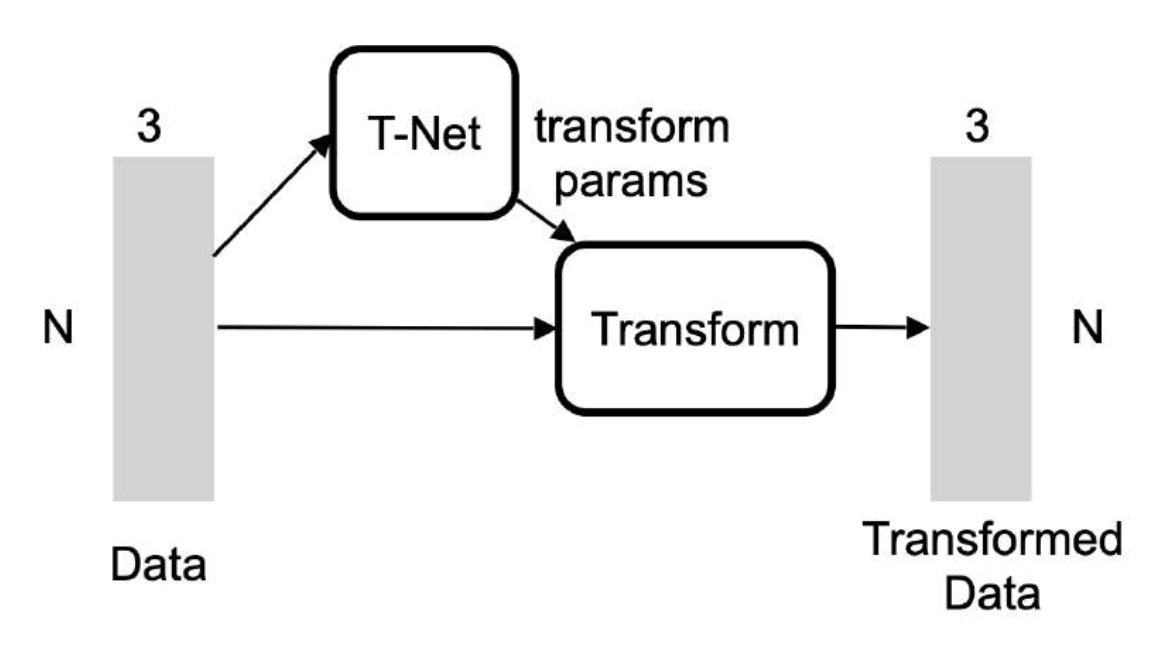
-
输出不应该受到点的刚体变换 (rigid transformation) 的影响
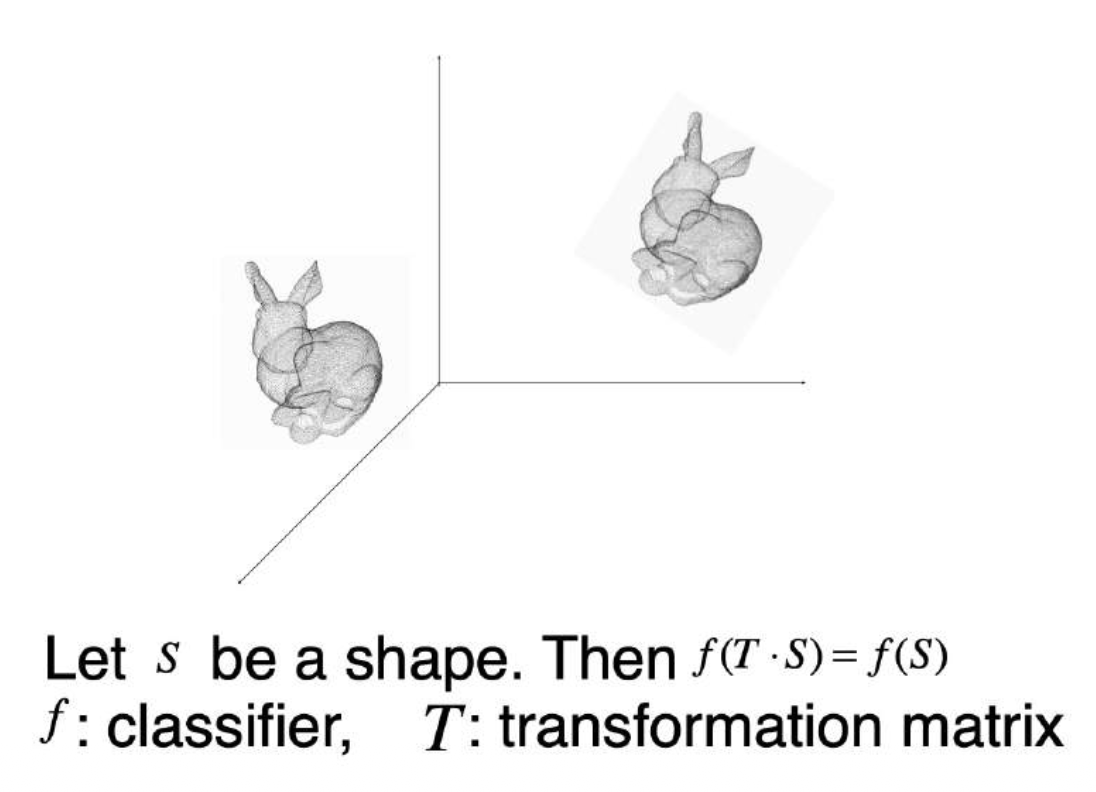
-
解决方案:使用另一个网络(T-Net)估计变换
-
效果
PointNet++⚓︎
PointNet 的局限:每个点缺少局部上下文(local context) 信息。
改进方法是 PointNet++,它是一种多尺度的 PointNet。
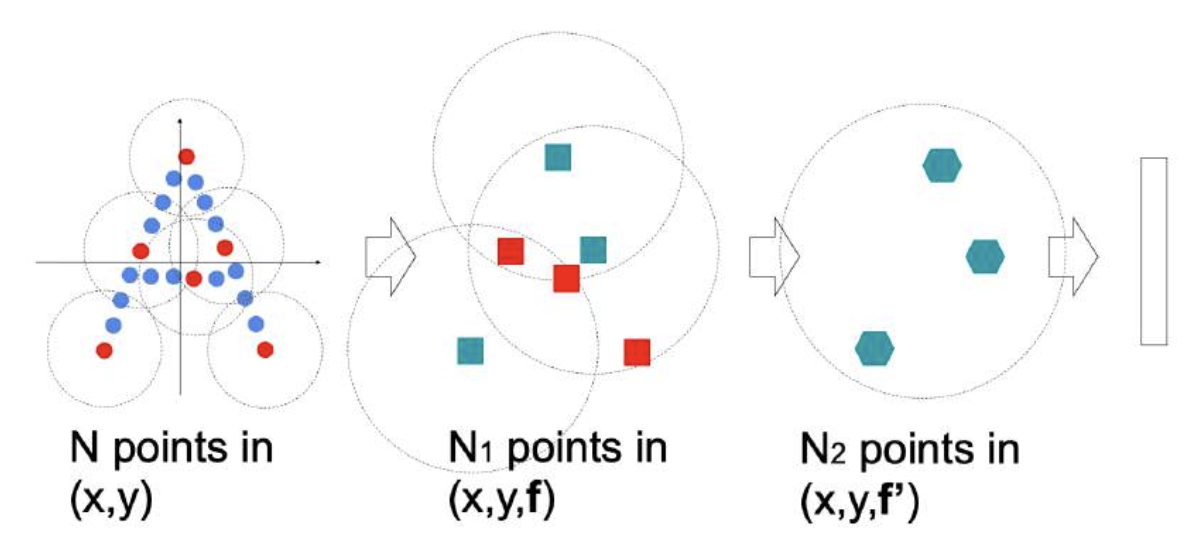
整个过程分为三部分:
- 采样:通过最远点采样(farthest point sampling, FPS) 采样锚点
- 分组:找到锚点的邻域(neighborhood)
- 在每个邻域中应用 PointNet 以模拟卷积
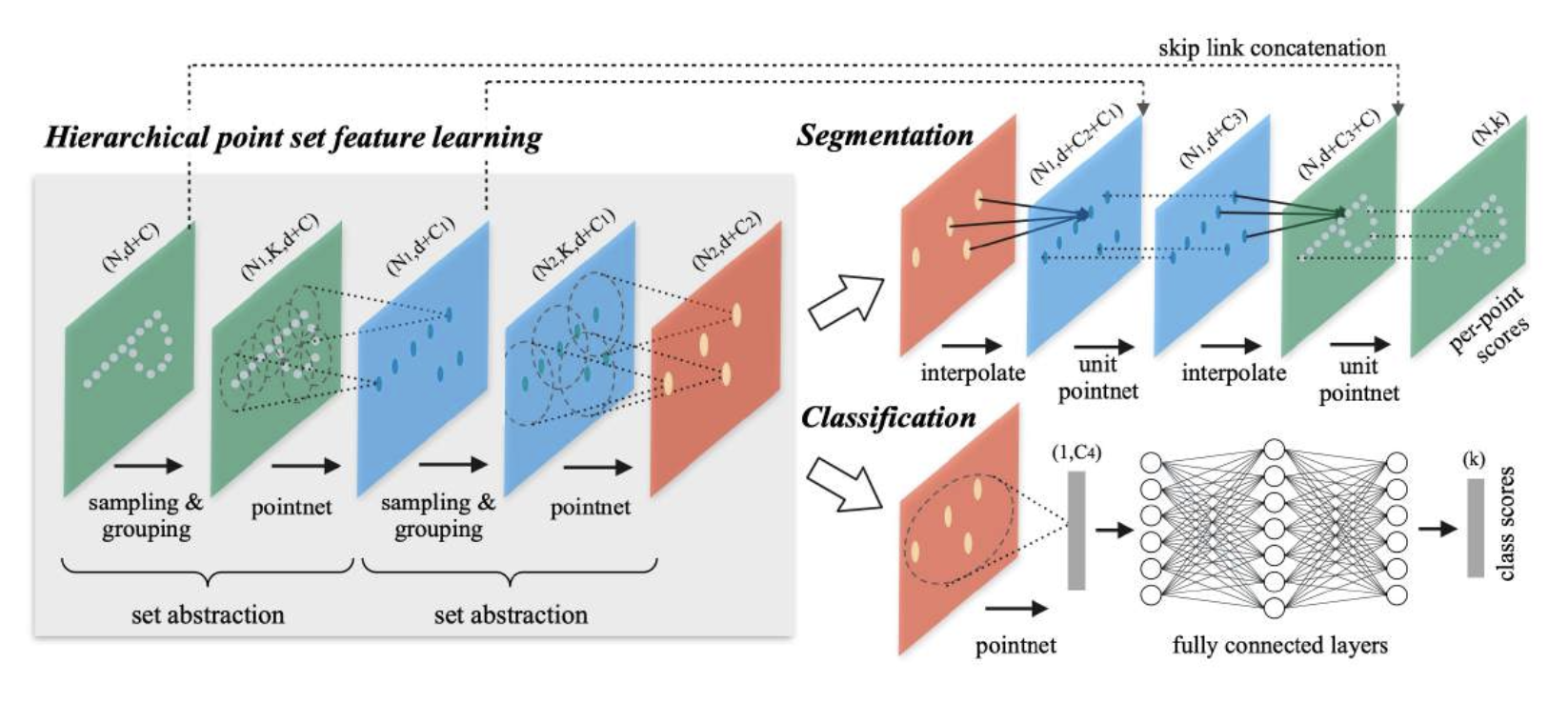
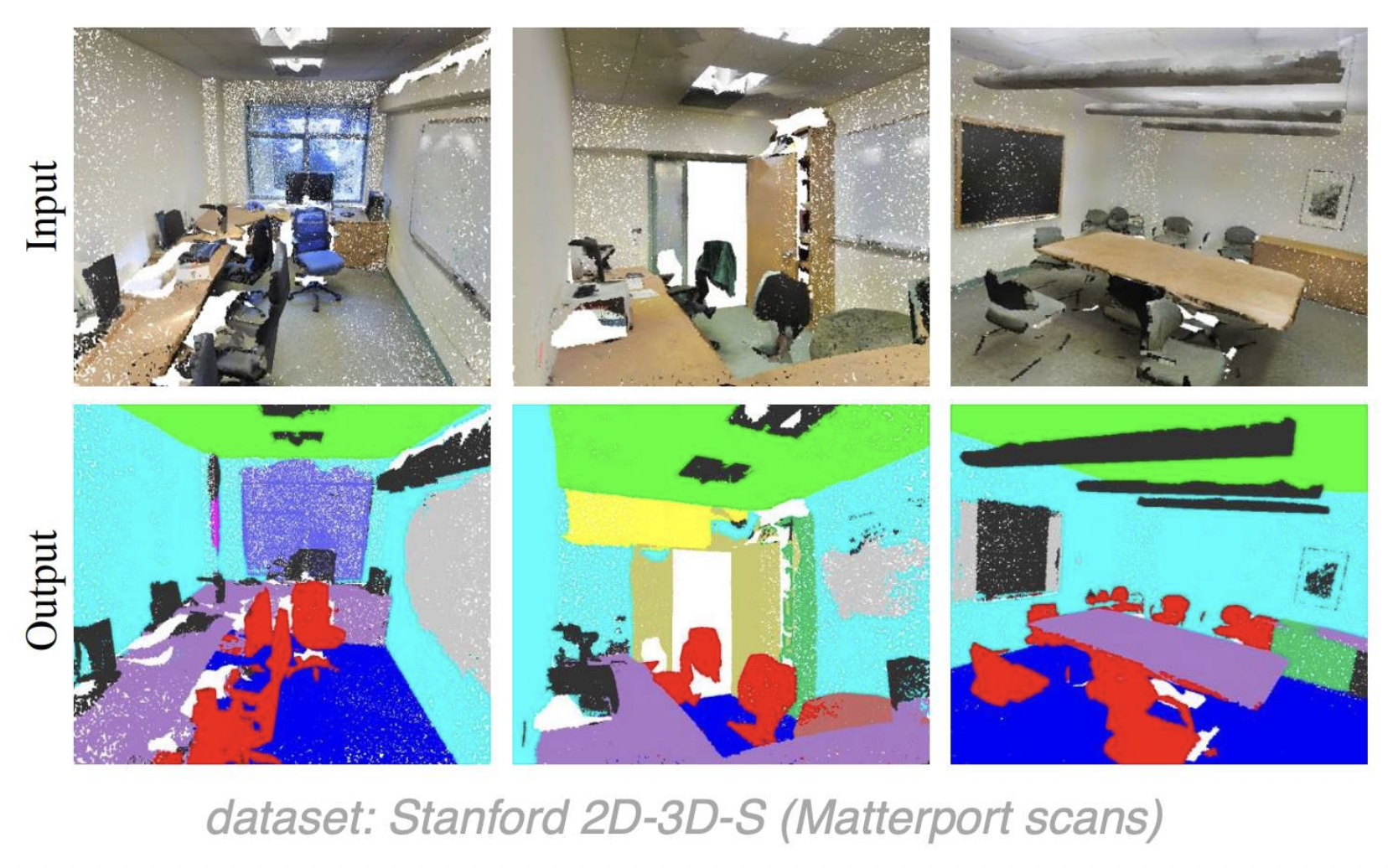
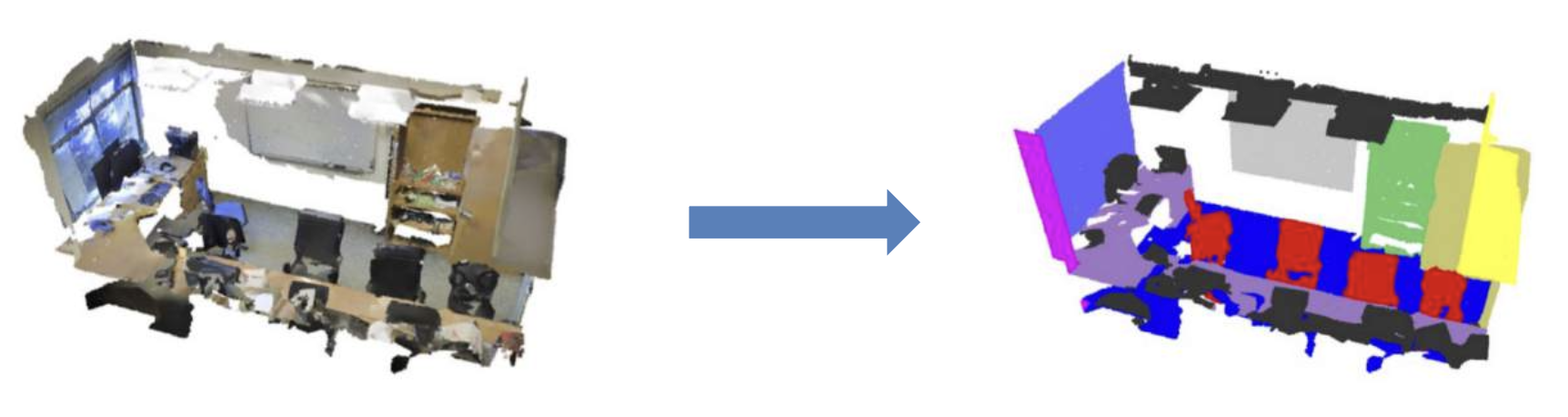
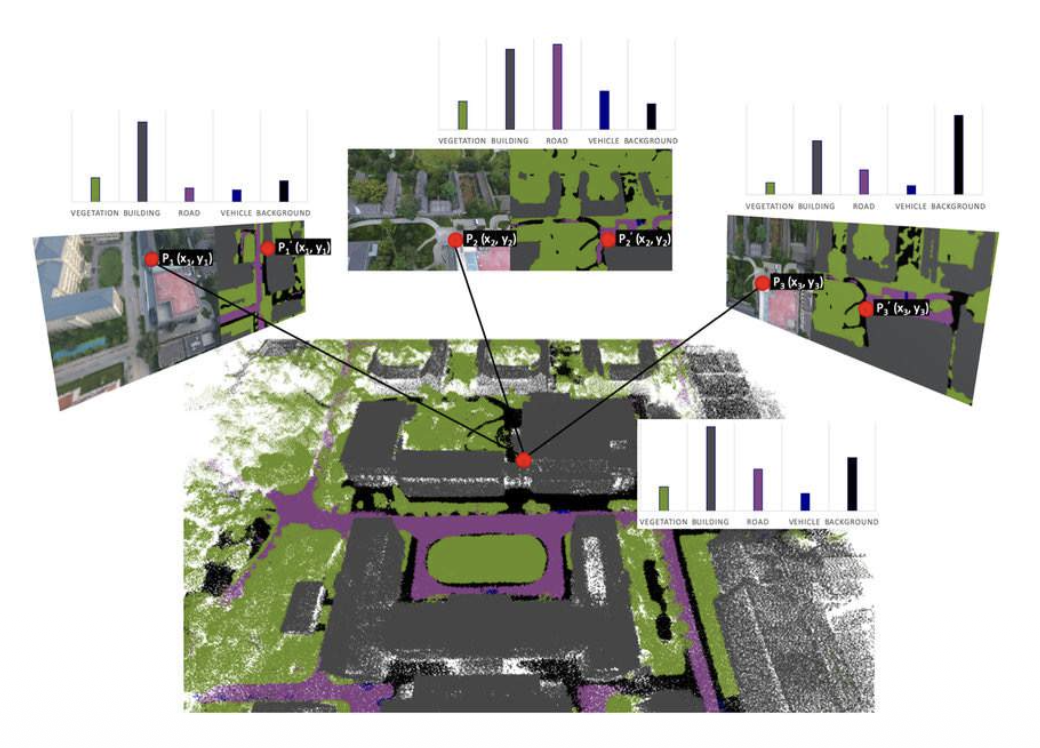
3D Semantic Segmentation⚓︎
- 输入:3D 场景的传感器数据(RGB / 深度 / 点云 ...)
- 输出:将点云中的每个点用类别标签标注
可能的解决方案:
-
直接分割点云
-
融合 2D 分割结果到 3D
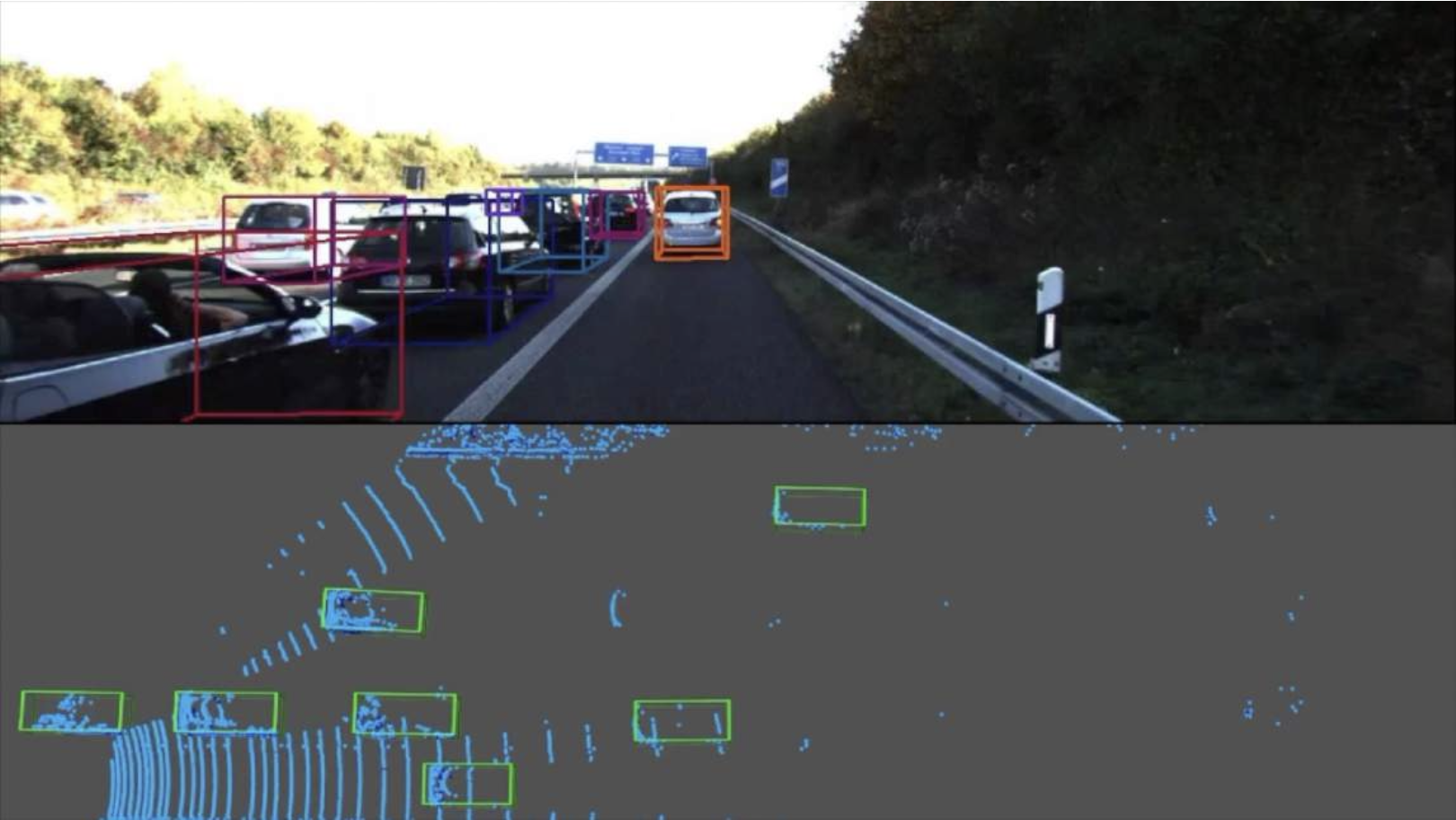
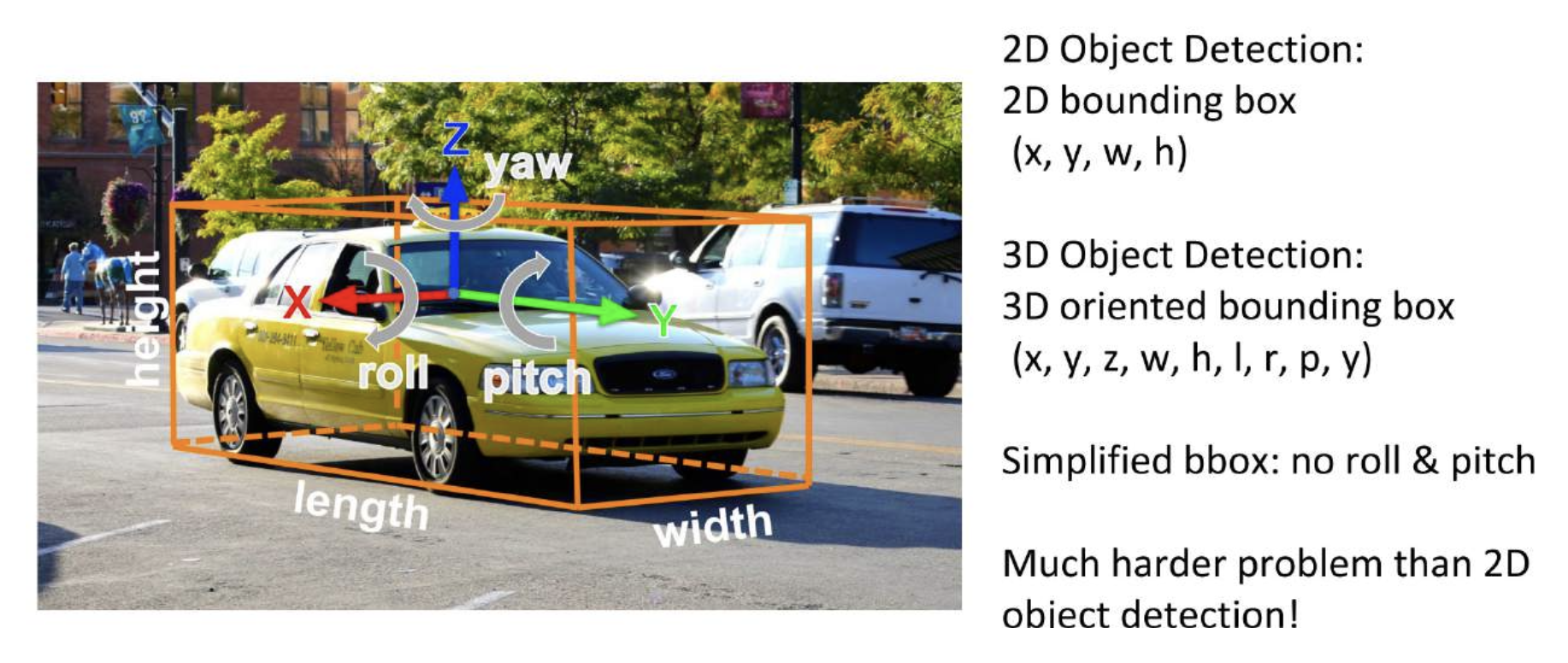
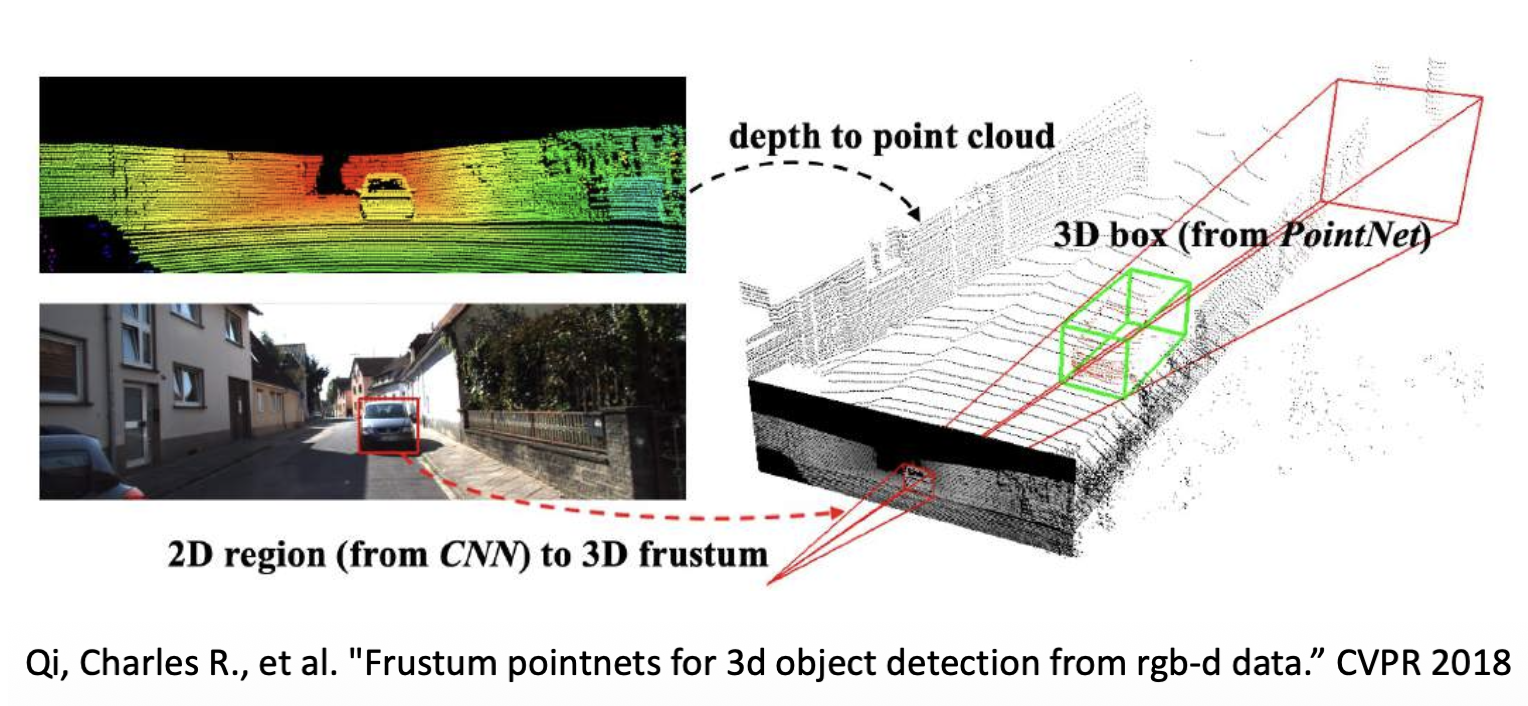
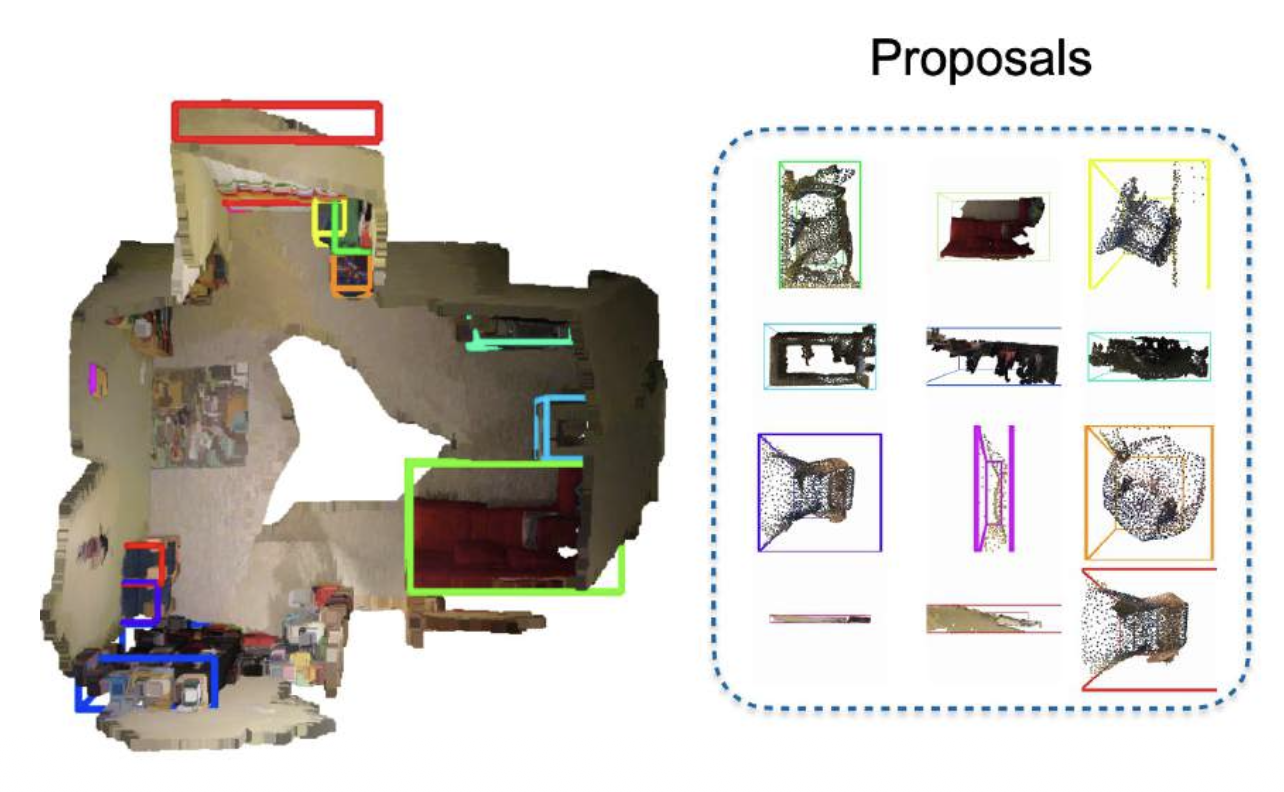
3D Object Detection⚓︎
检测 3D 数据中的 3D 物体
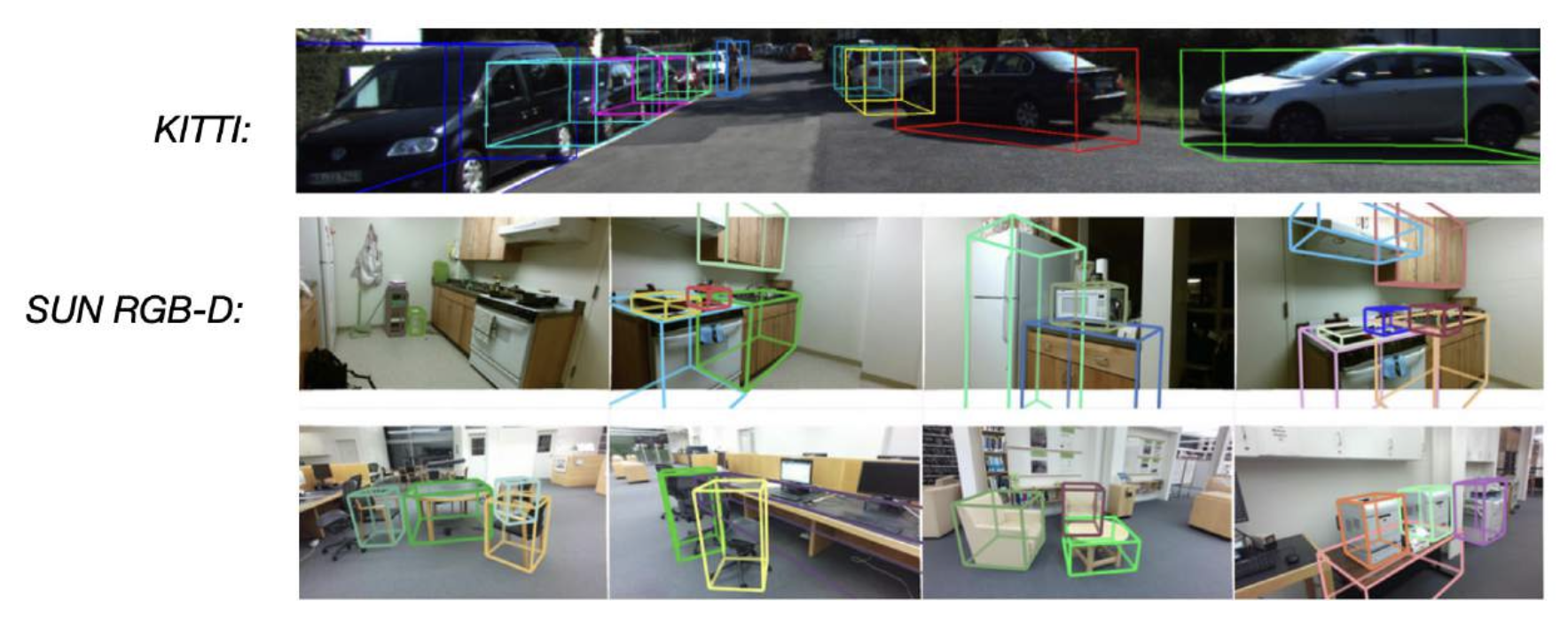
3D 包围盒:
尝试用滑动窗口分类:
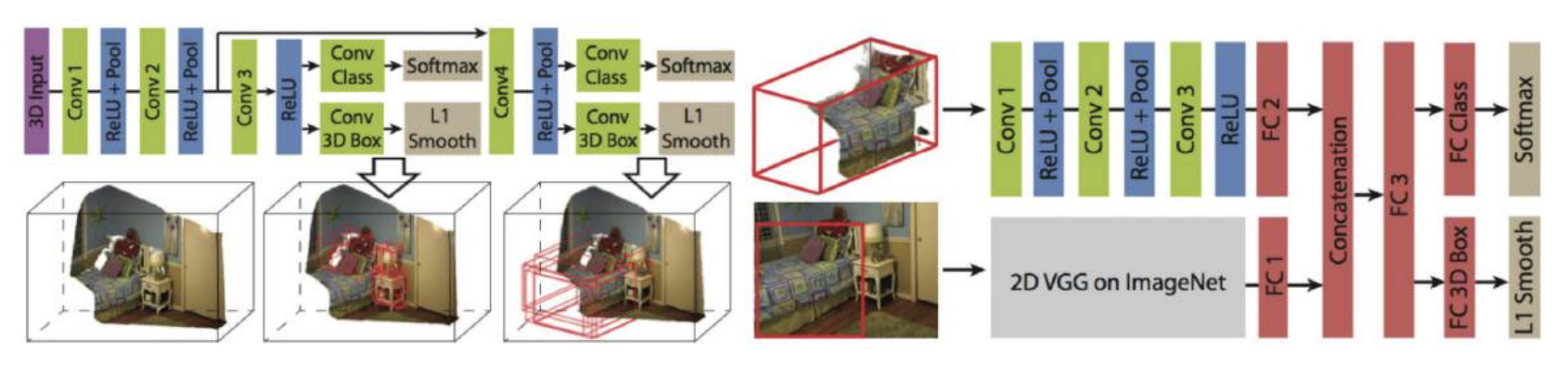
- 缺点:3D CNN 在时间和内存上的成本都很高
解决方案:
-
PointRCNN:用于点云的 RCNN
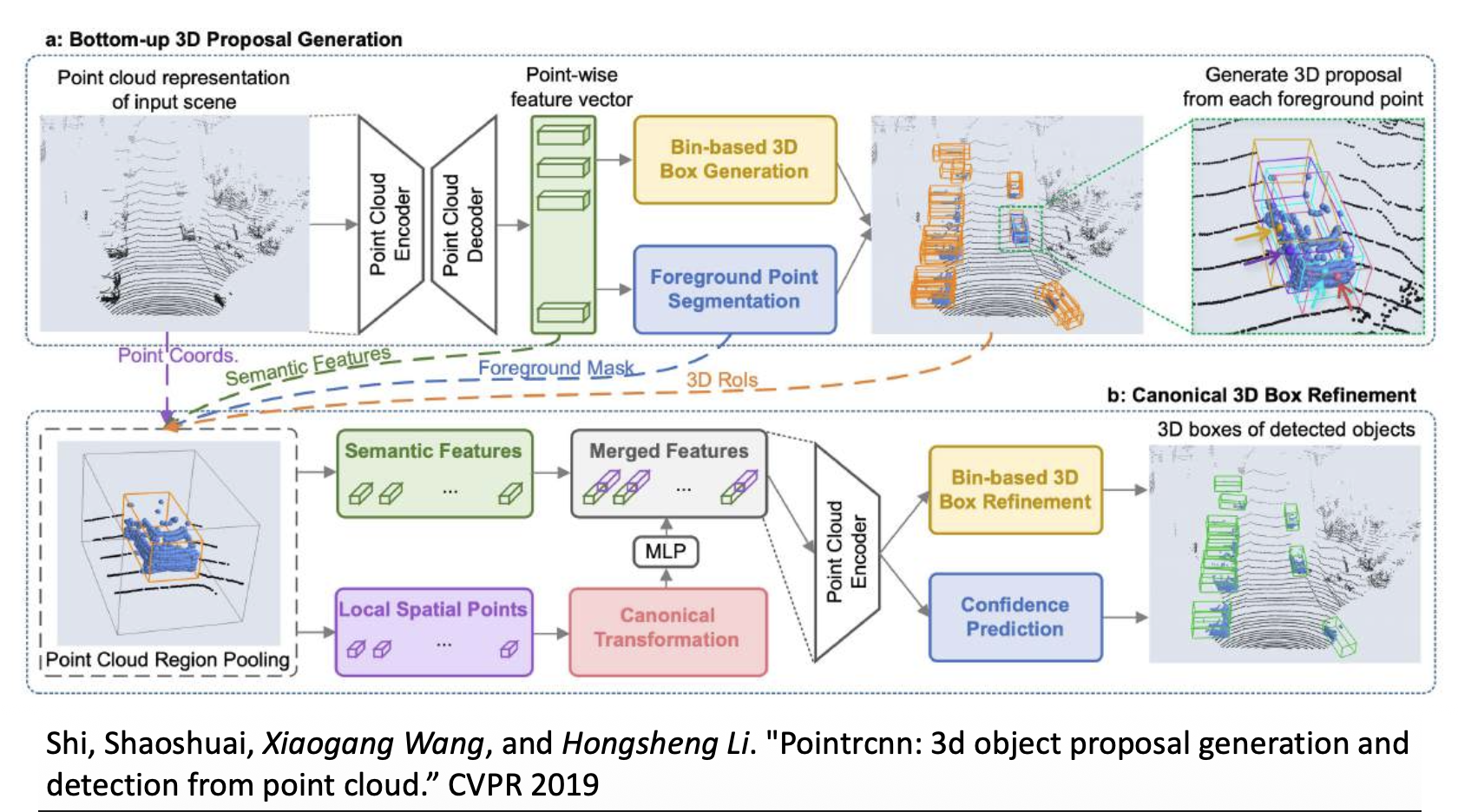
-
视锥 PointNet:使用 2D 检测器生成 3D 建议
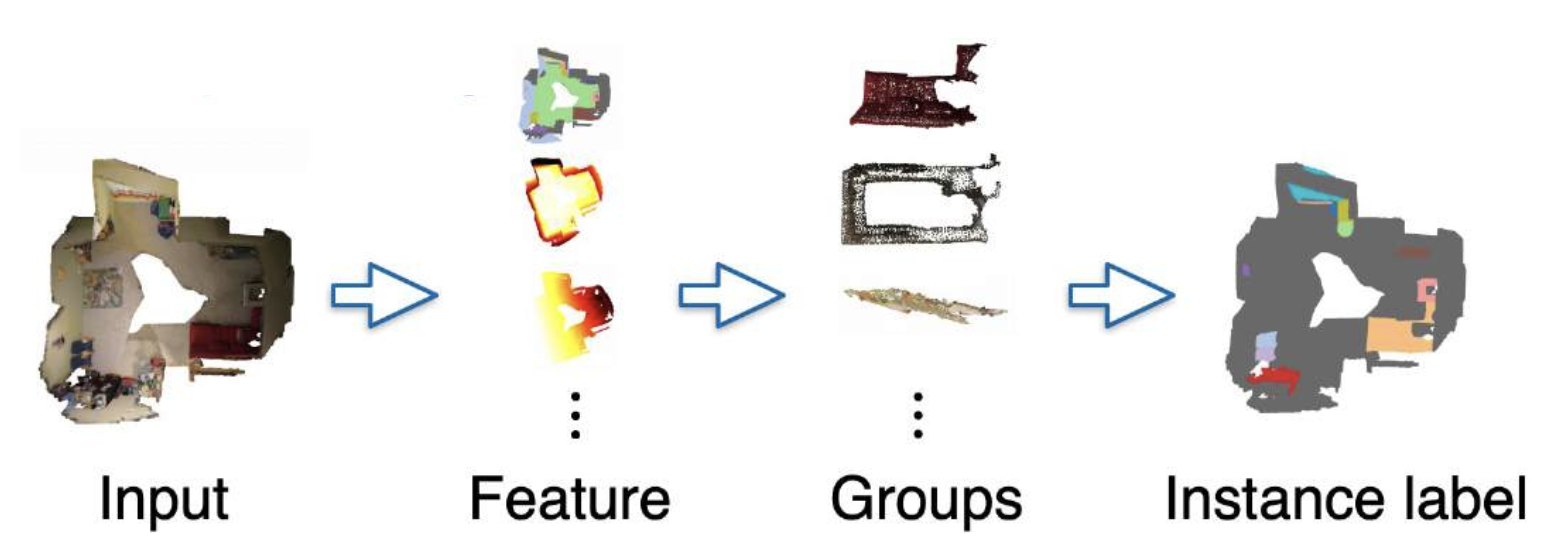
3D Instance Segmentation⚓︎
- 输入:3D 点云
- 输出:每个 3D 点的实例标签
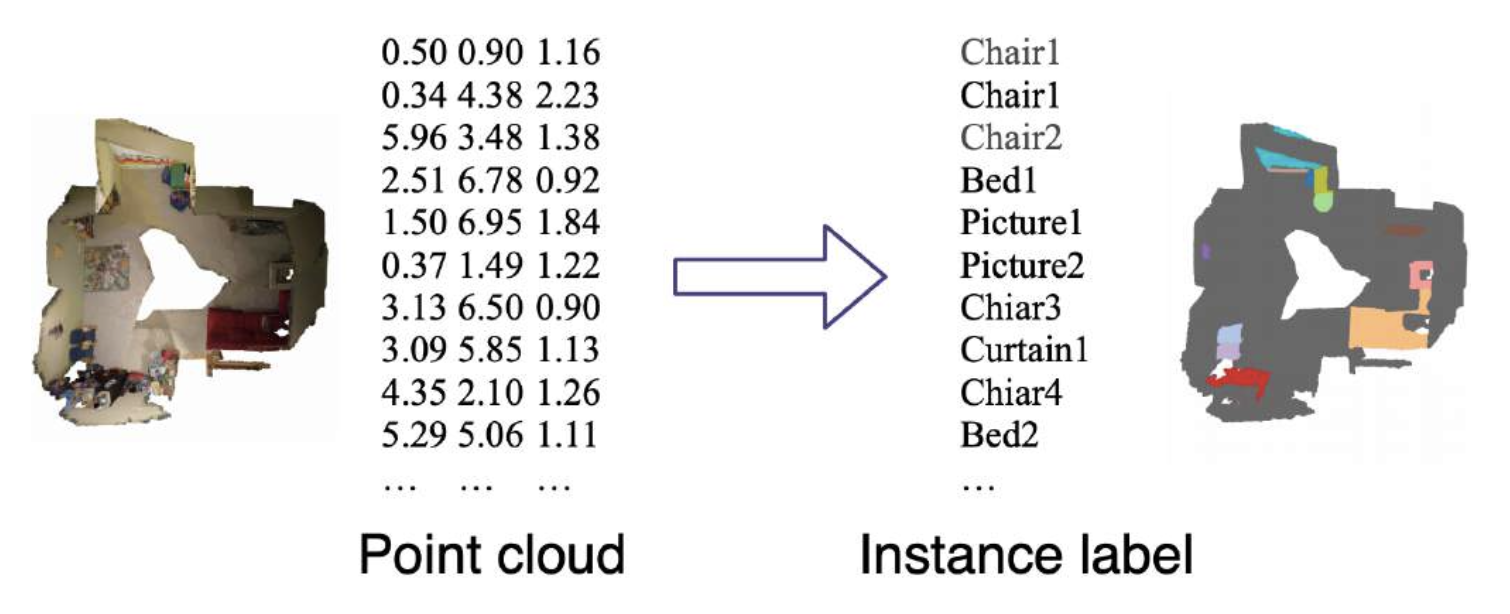
自顶向下的方法:
-
运行 3D 检测
-
在每个 3D 包围盒中运行分割
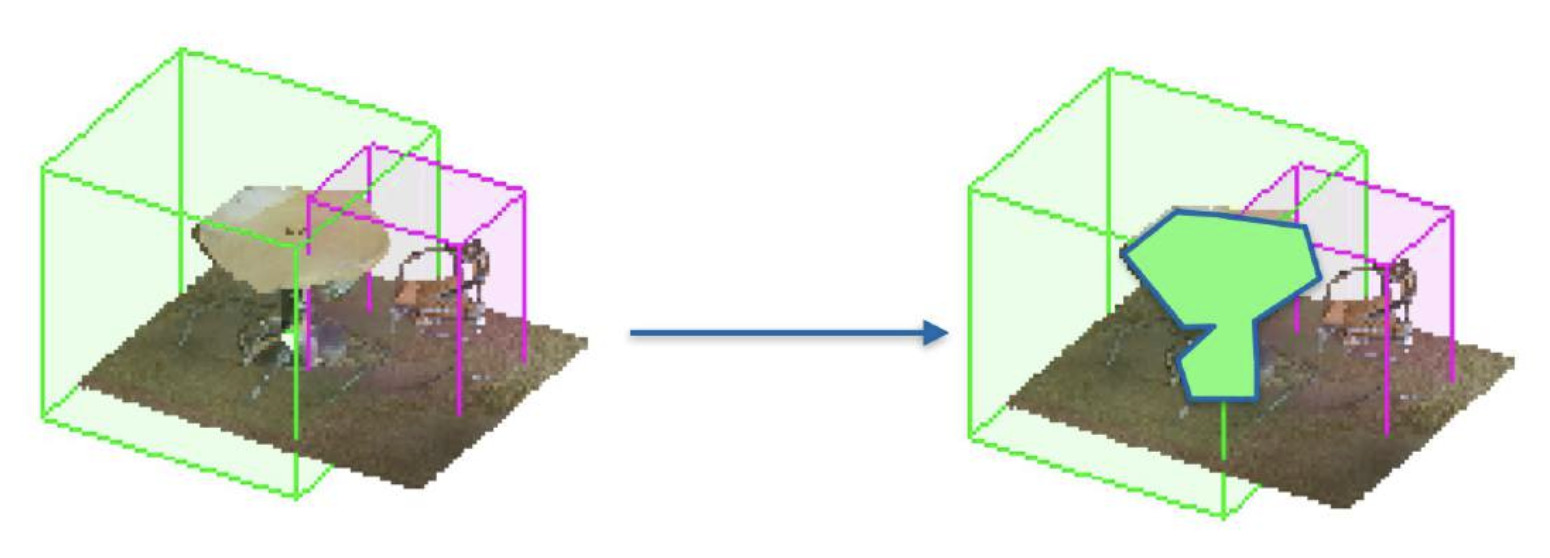
自底向上的方法:将(聚类 (cluster))点分组到不同的对象中
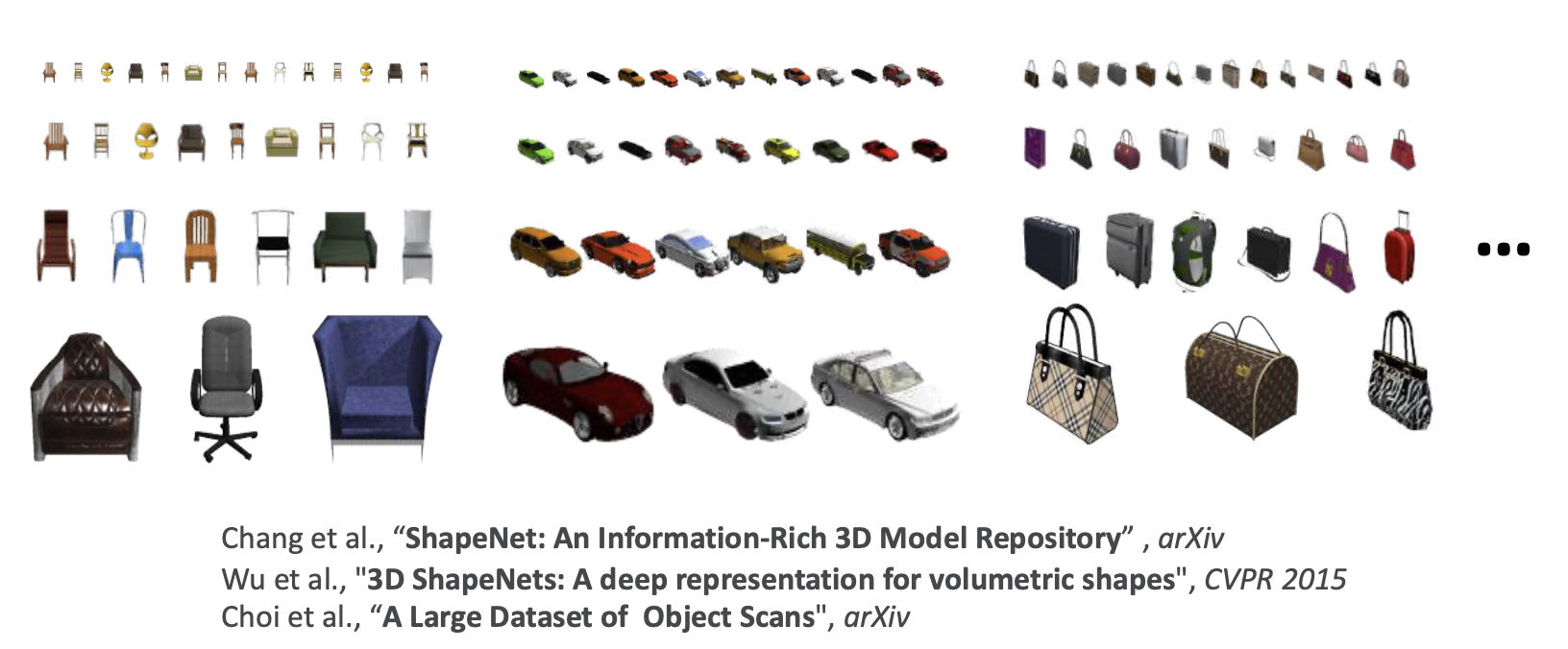
Dataset⚓︎
3D 目标的数据集:
-
ShapeNet:大规模的合成数据
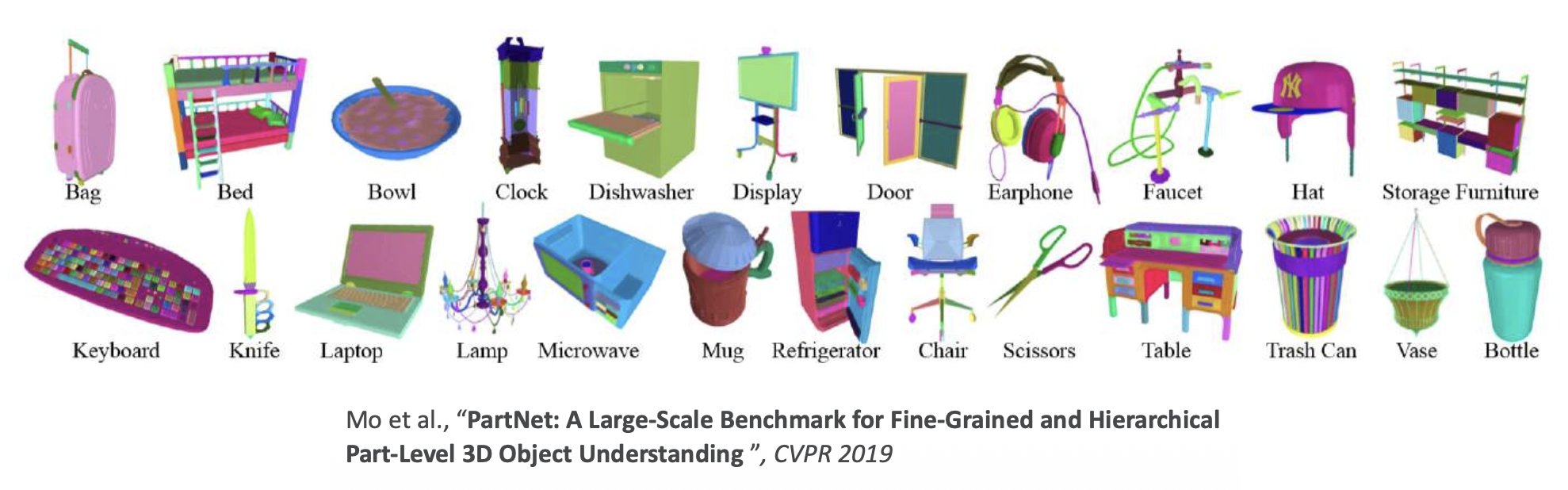
-
PartNet(ShapeNetPart2019):细粒度部分
- 细粒度 (fine-grained)(面向移动性 (mobility))
- 实例级 (instance-level)
- 分层 (hierarchical)
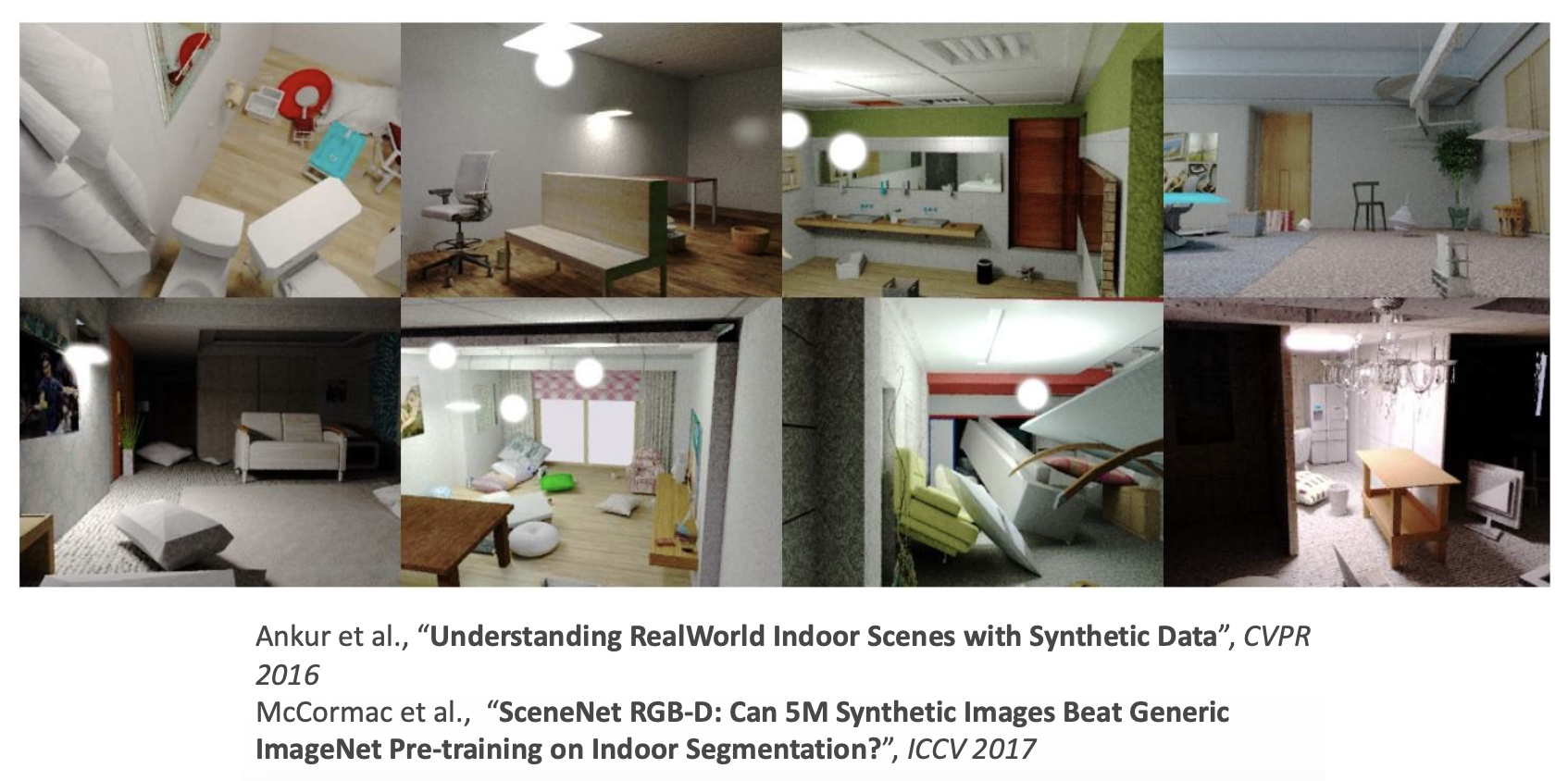
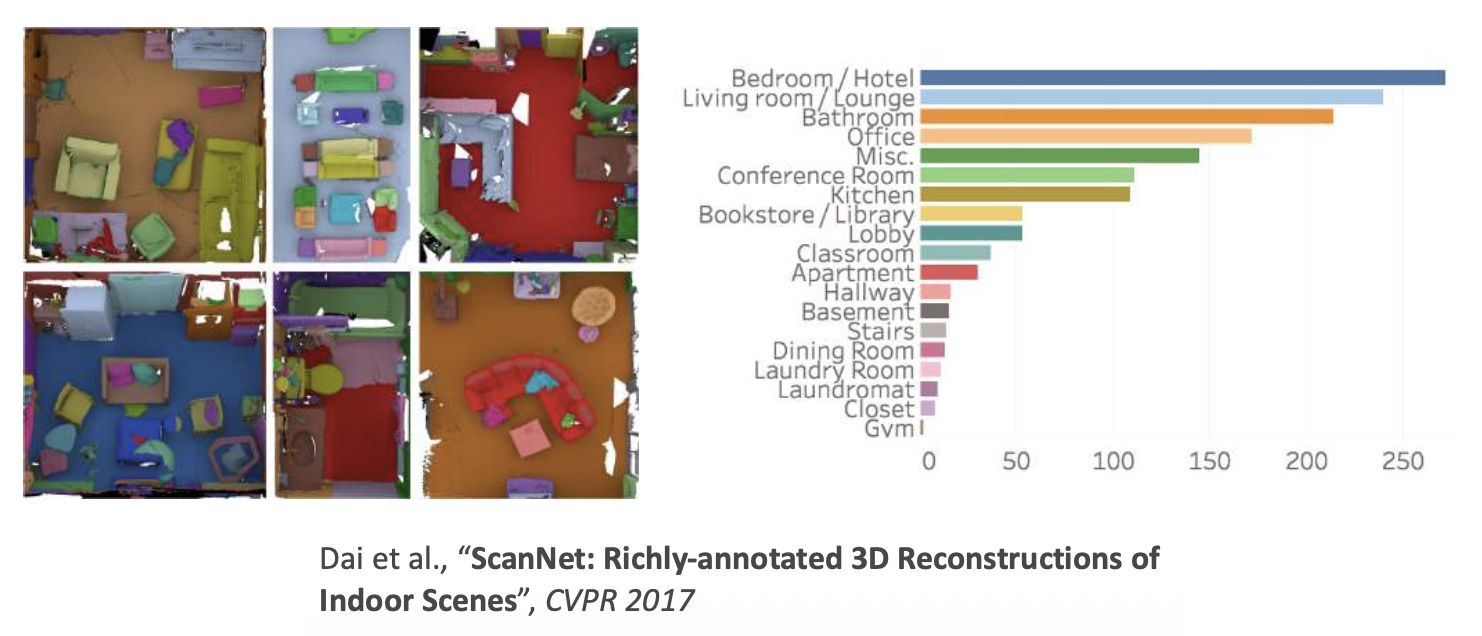
室内 3D 场景:
-
SceneNet:大规模合成场景
- 3D 网格
- 5M 张逼真图像
-
ScanNet:大规模扫描真实场景
- 在 1500 次 RGBD 扫描中的 2.5M 次观看
- 3D 相机姿态
- 表面重构
- 实例级语义分割
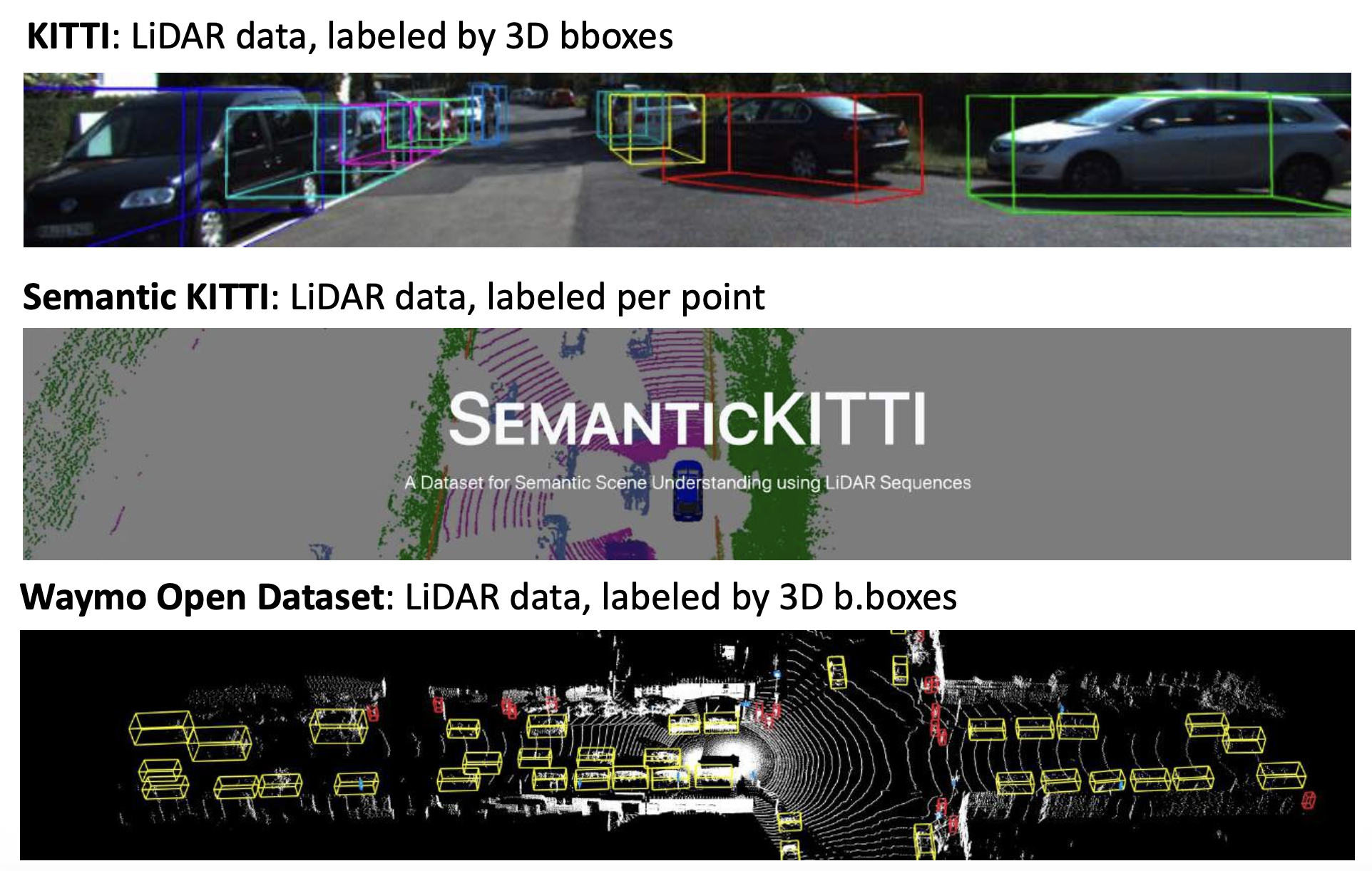
室外 3D 场景:
评论区